最近一直在看电机调速,主要是spwm和svpwm,现在把所看的东西总结一下。
首先是背景知识,电机学基本公式,所以引出三种调速方式,我们采用的是变频调速。关于变频调速,基频以上恒功率,基频以下恒转矩。然后是关于坐标变换的,3s-2s-2r,对应着两个变换,接着是建立三相异步电机的四大方程:同步旋转坐标系上的电压方程、磁链方程、转矩方程和运动方程。还有就是三种PWM技术:正弦PWM、优化PWM及随机PWM,我们在DTC中采用正弦PWM,且采用自然采样法。最后就是广泛采用的两种经典调频调速方式了:矢量控制和直接转矩控制。当然在这两种调速方式的硬件电路中都涉及到整流电路、滤波电路和逆变电路,其中整流电路由六个整流二极管组成三相不可控整流桥,滤波电容除了滤除整流后的电压纹波外,还在整流电路与逆变器之间起去耦作用,以消除相互干扰,这就给作为感性负载的电动机提供必要的无功功率,逆变电路的功率开关器件选用的是以绝缘栅双极晶体管(IGBT)为核心的智能功率模块(IPM)。
接着简单介绍两种控制方式:
1、矢量控制是通过三相静止轴系ABC——两相静止坐标系——两相同步旋转轴系两次坐标变换。在MT坐标系下面,将定子电流矢量分解为按转子磁场定向的两个直流分量im和it,并对其加以分别控制,控制im相当于控制磁通,控制it相当于控制转矩;
2、直接转矩控制
spwm是利用正弦波做载波,三角波做调制波,利用自然采样法生成spwm,其实现方法简单,可以用模拟电路构成三角波载波和正弦调制波发生电路,用比较器来确定它们的交点,在交点时刻对开关器件的通断进行控制,就可以生成SPWM波.但是,这种模拟电路结构复杂,难以实现精确的控制,这种方法是针对电源的;
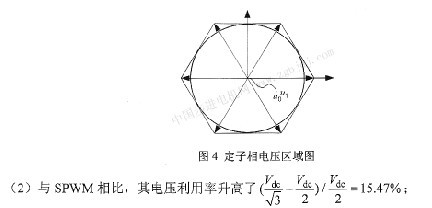
svpwm是以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成PWM波,以所形成的实际磁链矢量来追踪其准确磁链圆。spwm是从电源的角度出发,以生成一个可调频调压的正弦波电源,而SVPWM方法将逆变系统和异步电机看作一个整体来考虑,模型比较简单,也便于微处理器的实时控制;
最后说一下软件方面的东西:初始化、保护程序、AD采样转换、PID控制、速度采样、矢量变换等,其中具体的dsp实现还会涉及到很多子程序,这些都是在中断服务子程序中实现的,以后会有详细介绍,今天只是对调频调速做个大致的介绍和总结。