机械原理课程设计说明书
院系:机械学院
专业:机械设计制造及其自动化 班级:XXXX 设计者:XXX 指导老师:XXX
日期:XXXX年XX月XX日
目录
一、机械原理课程设计概述 .............................................................................. 1
1.1 机构机械原理课程设计的目的 ...................................................................................................... 1
1.2 机械原理课程设计的任务 .............................................................................................................. 2 1.3械原理课程设计的方法 ................................................................................................................... 2
二、压床机构设计要求 ..................................................................................... 2
2.1机构工作原理 ................................................................................................................................... 2 2.2机构设计要求 ................................................................................................................................... 4 2.4 设计内容及工作量 .......................................................................................................................... 5
三﹑执行机构方案选型设计 .............................................................................. 5
3.1类型1:不完全齿轮-齿轮组合机构 .............................................................................................. 5 3.2类型2:扇形-杆组合轮机构 .......................................................................................................... 6 3.3类型3:齿轮-杆组合机构 .............................................................................................................. 7 3.4类型4:六杆机构 ............................................................................................................................ 7
四﹑执行机构设计 ............................................................................................ 8
4.1 图解法求解执行机构的杆长 .......................................................................................................... 8
五﹑传动系统设计 .......................................................................................... 10
5.1 电动机的选择 ................................................................................................................................ 10 5.2 减速系统的设计 ............................................................................................................................ 10
六﹑机构分析 ................................................................................................. 11
5.2 连杆机构的运动分析 .................................................................................................................... 11 5.3 凸轮机构设计 ................................................................................................................................ 15
七﹑机械系统运动循环图 ............................................................................... 21 八﹑设计体会 ................................................................................................. 21 九﹑参考文献 ................................................................................................. 22
一、机械原理课程设计概述
1.1 机构机械原理课程设计的目的
机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学分析与设计的训练,是本课程的一个重要实践环节。其基本目的在于:
进一步加深学生所学的理论知识,培养学生独立解决有关本课程实际问题的
能力。
使学生对于机械运动学和动力学的分析设计有一较完整的概念。
使学生得到拟定运动方案的训练,并具有初步设计选型与组合以及确定传动
方案的能力。
通过课程设计,进一步提高学生运算、绘图、表达、运用计算机和查阅技术
资料的能力。 1.2 机械原理课程设计的任务
机械原理课程设计的任务是对机械的主体机构(连杆机构、凸轮机构、齿轮机构以及其他机构)进行设计和运动分析、动态静力分析,并根据给定机器的工作要求,在此基础上设计凸轮、齿轮;或对各机构进行运动分析。要求学生根据设计任务,绘制必要的图纸,编写说明书。
1.3械原理课程设计的方法
机械原理课程设计的方法大致可分为图解法和解析法两种。图解法几何概念较清晰、直观;解析法精度较高。根据教学大纲的要求,本设计主要应用图解法进行设计。
二、压床机构设计要求
2.1机构工作原理
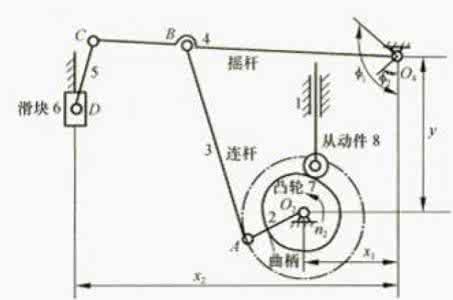
压床机械是由六杆机构中的冲头(滑块)向下运动来冲压机械零件的(见图1,机械系统的结构示意图)。如图2为其参考示意,其执行机构主要由连杆机构和凸轮机构组成。电动机经滑块减速传动装置(齿轮传动)带动六杆机构的曲柄转动,曲柄通过连杆、摇杆带动滑块克服阻力F冲压零件。当冲头向下运动时,为工作行程,冲头在0.75H内无阻力;当在工作行程后0.25H行程时,冲头受到的阻力为F;当冲头向上运动时,为空回行程,无阻力(见图3,冲头阻力曲线)。在曲柄轴的令一端,装有供润滑连杆机构各运动副的油泵凸轮机构。
图1 机械系统示意图
图2 压床机构参考示意图
F
Fmax
图3冲头阻力曲线
2.2机构设计要求
电动机轴与曲柄轴垂直,使用寿命10年,每日一班制工作,载荷有中等冲击,允许曲柄转速偏差为5%。要求凸轮机构的最大压力角应在许用值之内,从动见运动规设计数据,执行机构的传动效率0.95计算,按小批量生产规模设计。 2.3 设计数据
表1 设计数据
分析 导杆 机构 运动 分析
转速n2 距离x1 距离x2 距离y 冲头行程H 1 下极限角2
92 40 170 180 180 120 60 4600 64 0.24
r/min
mm mm mm
o
o
导杆 机构 动态
工作阻力Fmax 连杆3质量m3 连杆3质心转动惯量Jc
3
N
kg
kgm2
静力 分析
滑块6质量m6 摇杆4质量m4 摇杆4质心转动惯量Jc4Jc4
36 50 0.22 20 正弦 32 70 10 70
kg kg
kgm2
凸轮 机构 设计
从动件最大升程H 从动件运动规律 许用压力角 推程运动角0 远休止角3 回程运动角
'0
mm o
o
o
o
2.4 设计内容及工作量
1. 根据压床机械的工作原理,拟定2~3个其他形式的执行机构(连杆机构)并
对这些机构进行分析对比。 2. 根据给定的数据确定机构的运动尺寸,lCB0.5lBO4,lCD(0.25~0.35)lCO4。要求用图解法设计,并写出设计结果和步骤。
连杆机构的运动分析。将连杆机构放在直角坐标系下,编制程序,分析出滑块6的位移、速度、加速度和摇杆4的角速度和角加速度,并画出运动曲线,打印上述各曲线图。
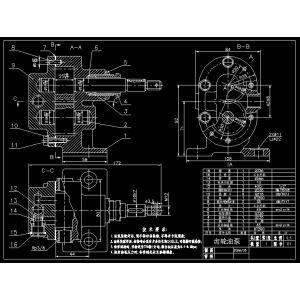
凸轮机构设计。根据所给定的已知参数,确定凸轮的基本尺寸(基圆半径r0,偏距e和滚子半径rr),并写出运算结果。将凸轮机构放在直角坐标系下,编程画出凸轮机构的实际廓线,打印出从动件运动规律和凸轮机构仿真模型。
三﹑执行机构方案选型设计
3.1类型1:不完全齿轮-齿轮组合机构
图4不完全齿轮-齿轮组合机构
不完全齿轮-齿轮组合机构(见图4)是由不完全齿轮1和不完全齿轮3、齿轮2和齿轮5、齿条组成,其中以齿轮1为原动件,不完全齿轮1和不完全齿轮3为一体。当不完全齿轮1和齿轮3转时,不完全齿轮带1带外齿轮2,滑块向下运动,且不完全齿轮3不带带内齿轮4;反之,齿轮3带动内齿轮4,齿轮1不带动齿轮2。,滑块向上运动。该机构有如下优缺点:
优点:①能保证瞬时传动比恒定,平稳性较高,传递运动准确可靠; ②传递的功率和速度范围较大;
③结构紧凑、工作可靠,可实现较大的传动比; ④齿轮和齿条直接啮合,传动灵敏性非常高。
缺点:①齿轮的制造、安装要求较高,因而成本也较高;
②不宜作远距离传动;
③在工作中有较大的冲击力,齿轮和齿条易顺坏,使用寿命减短。 3.2类型2:扇形-杆组合轮机构
扇形-杆组合轮机构由齿条、扇形、和三条杆组成,大齿轮与曲柄连为一体,以小齿轮为原动件,带动大齿轮作圆周运动,摇杆通过滑块与曲柄连接作往复摆动(见图5)。该机构有如下优缺点:
优点:①扇形齿轮齿条机构具有良好的结构及传动刚性;
②机床具有精度较高、 可靠性好和低噪音的特点; ③曲柄摇杆机构制造工艺简单,制造成本低;
缺点:①扇形齿轮、齿条的制造、安装要求较高,成本也较高;
②载荷有较大的冲击力,扇形齿轮、齿条易受损,使用寿命短。
图5 扇形-杆组合轮机构
3.3类型3:齿轮-杆组合机构
图6齿轮-杆组合机构
该机构由两个齿轮和三条杆以及滑块组成(见图6), 大齿轮与曲柄连为一体,以小齿轮为原动件,带动大齿轮作圆周运动,摇杆通过滑块与曲柄连接作往复摆动。该机构优缺点如下:
优点:①齿轮传动结构紧凑、传动效率高和使用寿命长;
②齿轮传动的功率大、转速高;
③曲柄导杆机构制造工艺简单,成本低;
缺点:①制造齿轮需要有专门的设备,安装精度高,成本高;
②啮合传动会产生噪声。 3.4类型4:六杆机构
以曲柄为原动件作周转运动,摇杆通过连杆与曲柄连接作往复摆动,带动滑
块上下往复运动。
优点:①加工制造容易,成本低;
②承载能力较大,使用寿命长; 缺点:①机械效率低;
②不宜用于高速运动。
图7 六杆机构图
综合分析选定执行机构:压床机构设计要求使用寿命为10年,载荷有中等冲击,按小批量规模生产,因而应选用使用寿命较长、承载能力较大、生产成本低的执行机构。因此,选用执行机构方案4。
四﹑执行机构设计
4.1 图解法求解执行机构的杆长
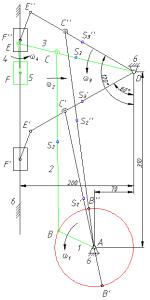
本机构为瓦特II型的六杆机构,瓦特II型的六杆机构是有两个四杆机构的一般串联,本机构就是由曲柄摇杆机构O2ABO1和摇杆滑块机构O1CDE构成(见图8),其中曲柄为O2A。因此,该六杆机构的参数可以通过四杆机构的知识来求解。
由表1知该执行机构的一些条件:
铰链点O1与铰链点O2的水平、铅直距离分别是x140mm和y180mm; 铰链点O1与滑块的水平距离x2180mm; 摇杆的上下极限角11200、2600; 冲头行程H180mm;
lCB0.5lBO4,lCD(0.25~0.35)lCO4。
本文选择采用简单的图解法来解决该问题。首先求解曲柄摇杆机构O2ABO1
的各个杆长,该问题就转变为了通过四杆机构的两个极位求解杆长。注意到三角形O1C1C2为等边三角形,铰链点O1与滑块的水平距离x2180mm为定值,且
x2D1C1cosE1D1C1O1C1cosHO1C1xDCcosEDCOCcosHOC2221221212
D1C1D2C2
O1C1O1C2HO1C1HO1C2
所以有,E1D1C1E1D2C2,即四边形D1D2C2C1为平行四边形,可以得到,
D1D2C2C1
又因为,O1C1C2为等边三角形,所以有,
O1C1C2C1D1D2190mm O1C1
0.5O1B1126.7mm
图8 图解法
lCD
然后通过铰链点O1与铰链点O2的水平距离x2和冲头行程H、
(0.25~0.35)lCO4来确定冲头的两个极限位置,具体步骤如下:
画出所有已知条件,铰链点O1与铰链点O2的位置,和滑块的支架位置,以
及摇杆OC的两个极限位置O1C1、O1C2;
连接O2B1和O2B2,O2B1253.1mm,O2B2135.9mm有下面的关系,
O2B1O2AAB
OBOAAB222
解得,O2A58.6mm ,AB194.5mm。 最后,由lCD(0.25~0.35)lCO4确定CD57mm。 经上述分析和计算,得到执行机构的各杆杆长,见表2。
表2 执行机构杆长
AO2ABO1BBCCD五﹑传动系统设计
5.1 电动机的选择
选择电动机种类应在满足生产机械对拖动性能的要求下,优先选用结构简单、运行可靠、维护方便、价格便宜的电动机,因此,要综合考虑了电动机的机械特性应与所拖动生产机械的机械特性相匹配、调速性能、电源种类以及经济性。
我们选用电动机类型如下表3。
表3
型 号 额定功率 额定电流 转速 效率 重量
Y132S-6
3 7.2 960 83.0 66
单位
kw
A
r/min % kg
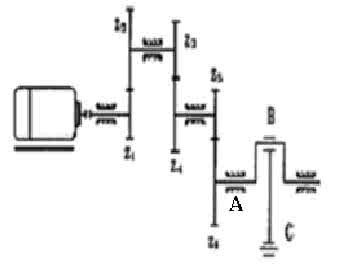
5.2 减速系统的设计
选用转速为960 r/min的电动机,Z1=20,Z2=30,Z3=20,Z4=40,Z5=29,Z6=89,由锥齿轮1、锥齿轮2、齿轮3、齿轮4和齿轮5组成定轴轮系,H和内齿轮6、支架组成行星轮。
n1960r/min
in1Z230n2640r/min 12n2Z120
nnZZH
i363H466
n6nHZ3Z5
n3n2
n60r/minnH89.7/min H640nH
6i36
nH
2
nH
wH 9.39rad/s
60
图9 减速系统
六﹑机构分析
5.2 连杆机构的运动分析 5.2.1 直角坐标系的建立
图10 执行机构的直角坐标系图
5.2.2 连杆机构的运动分析
摇杆转角与曲柄转角的关系:
yO1Bx1O2AsinABsinxOAcosABcosy
2O1B
22
, BO1yO1BxO1B
yOB1)
xO1B
其中,t。
图11 摇杆转角与时间的关系图
摇杆的角速度v:
v(t)
d(t)
dt
图12 摇杆角速度与时间的关系图
摇杆的角加速度a:
d2(t)dv(t)
a(t)
2
dtdt
图13 摇杆角加速度与时间的关系图
滑块位移Sslider与曲柄转角的关系:
SslideryO1CcosDCcos
xOCsinDCsin21
图14 滑块位移与时间的关系图
滑块的速度vslider:
vslider(t)
dSslider(t)
dt
图15 滑块速度与时间的关系图
滑块的加速度aslider:
d2Sslider(t)dvslider(t)
aslider(t) 2
dtdt
图16 滑块加速度与时间的关系图
5.3 凸轮机构设计
本机构的凸轮是正弦加速度运动规律,从动件的最大升程H20mm,许用压力角30o,推程运动角070o,远休止角0110o,回程运动角0'70o。
r040mm,e4mm,rr8mm,h20mm。
理论廓线的极坐标表达式:
r()
其中,s()是推杆的位移。
r02e2s2()e2
理论廓线的直角坐标表达式:
xr()cos
yr()sin
由于MATLAB只需简洁的编程而拥有强大的画图功能,我们不用C语言或VB,
选择采用MATLAB编程来画出凸轮的理论廓线和凸轮的实际廓线。(程序见附录)
图17 凸轮理论廓线
5.3.2推杆的运动规律
推程阶段060o,
2sin0
s()h0
2
远休阶段010o,
s()h
回程阶段060o,
1
s()h
2sin00
2
近休阶段0230o,
s()r0
图18 推杆位移与时间图
图19 推杆速度与时间关系图
图20 推杆加速度与时间关系图
5.3.3凸轮的实际廓线
arctan
y x
为了方便MATLAB计算和仿真,进行如下取值,
y
x
y
x
2yx
由此得,
x0,y0x0x0,y0
x0xrrcos
y0yrrsin
图21 凸轮实际廓线
5.3.4凸轮的仿真模型
通过MATLAB对凸轮进行仿真,如下是仿真过程的截图(程序见附录cam_sine.m):
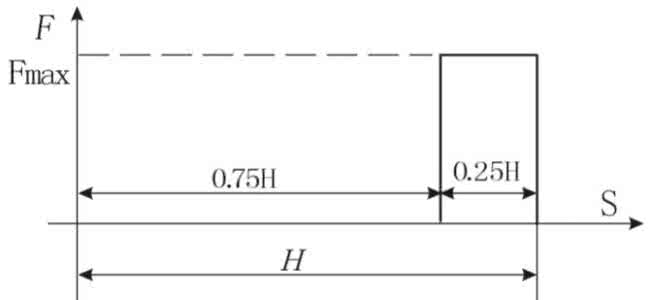
图22 凸轮仿真截图1
图23 凸轮仿真截图
2
图24 凸轮仿真截图3
5.3.5凸轮的压力角
其中,s0ds/de s0s1r02e2 。
由MATLAB计算得(程序见附录),
max()28.5o[]30o。
七﹑机械系统运动循环图
用来描述各执行构件运动间相互协调配合的图称为机械的运动循环图。它是机械协调设计的重要技术文件。用来描述各执行构件运动间相互协调配合的图称为机械的运动循环图。它是机械协调设计的重要技术文件。圆周式运动循环图的绘制方法是确定一个圆心,画一个圆。再以该圆心为中心,作若干个同心圆环,每个圆环代表一个执行构件。各执行构件不同行程的起始和终止位置由各相应圆环的径向线表示。该机构的运动循环图外圈是角度,最外的一环是描述推杆的运动状态,第二环是描述滑块的状态。当曲柄转动,曲柄和滑块、推杆的关系如下:
图25 机构运动循环图
八﹑设计体会
通过这几周机械原理课程设计,让我受益匪浅,从中学习都很多知识,也提高了自己独立思考的能力。
机械课程设计本是一门十分深奥、复杂的学科,在上课的时候,很多东西没有深入理解。通过课程设计,我发现自己的自己学得很不扎实,同时,发现自己的不足之时,为了做好课程设计,我不断的专研了课本,对机械原理这门课程有了进一步的了解。在设计的过程,不仅要用到机械原理的知识,也用到了大一学习的知识,特别是制图和高数这两门课的知识。同时,我在这些天中不断的写代码,编了很多程序,编程水平也有了显著的提高。这次课程设计是我们以后毕业设计的前奏,综合运用了我们所学过的大部分知识,为我们以后毕业设计奠定基础。
九﹑参考文献
[1]孙恒,陈作模,葛文杰.机械原理[M] (第七版).高等教育出版社.1996.
[2]申永胜.机械原理教程[M] (第2版).清华大学版社.1991.
[3]王淑仁.机械原理课程设计[M].科学出版社.2006.
[4]邹慧君.机械原理课程设计手册[M].高等教育出版社.1991.
[5]姜琪主.机械运动方案及机构设计[M].高等教育出版社.1991.
JY1302-压床机械设计2(需要图纸的,请于下面网址下载) http://yunpan.cn/cmKNqIEBZtpkY
访问密码,见最后一页,下载可见
http://yunpan.cn/cmERWDwqvZFRn
访问密码 f7f4
百度搜索“爱华网”,专业资料,生活学习,尽在爱华网