西安科技大学高新学院
课程设计报告
学
课
专
班
姓
学院程业级名号机电信息学院机械原理课程设计机械设计制造及其自动化机械1102刘晓亮1102060223
姬莉莉指导教师日期
《机械原理课程设计》任务书姓名刘晓亮学号1102060223专业及班级机械1102题目:压床机构
完成时间:2013年7月19日
具体内容及进度要求:
1.连杆机构的设计及运动分析
⑴作机构的运动简图并计算各干长度。
⑵机构运动速度分析﹑加速度分析。
2.机构动态静力分析
⑴计算各构件的惯性力﹑惯性力矩。
⑵计算运动副的反作用力。
⑶求作用在曲柄AB上的平衡力矩。
3.凸轮机构的设计
⑴凸轮参数计算。
⑵绘制凸轮运动线图。
进度要求:7月8日
7月9日
析,以及凸轮的狗的设计。
7月12日
7月18日写压床机构的说明书。进行答辩交作业。熟悉课题查阅相关资料。作连杆机构的设计及运动分析﹑机构动态静力分
指导教师姬莉莉
2013年7月9日
成绩教师
目录
一、压床机构设计要求................................................................................................3
1.压床机构简介.....................................................................................................3
2.设计要求和内容.................................................................................................4
(1)机构的设计及运动分折........................................................................4
(2)机构的动态静力分析............................................................................4
(3)凸轮机构构设计....................................................................................5
二、压床机构的设计....................................................................................................7
1、连杆机构的设计及运动分析...........................................................................7
(1)作机构运动简图并计算各杆长度........................................................7
(2)机构运动速度分析:............................................................................9
(3)机构运动加速度分析..........................................................................11
(4)机构动态静力分析..............................................................................13
2.计算各运动副的反作用力.............................................................................14
(3)求作用在曲柄AB上的平衡力矩...........................................................17
三、凸轮设计..............................................................................................................18四﹑心得体会..............................................................................................................19
五、参考文献..............................................................................................................21
一、压床机构设计要求
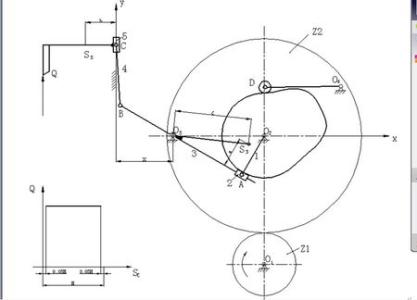
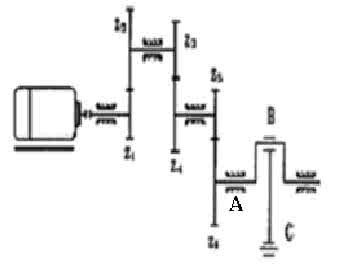
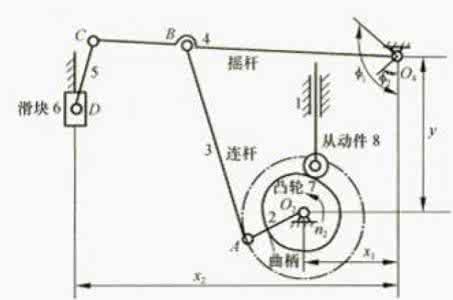
1.压床机构简介
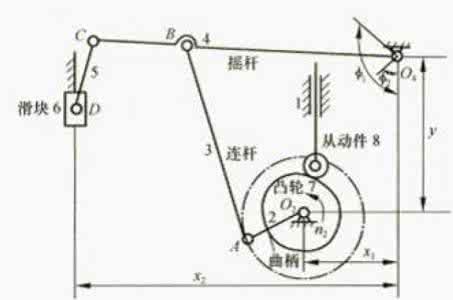
图9—6所示为压床机构简图。其中,六杆机构ABCDEF为其主体机构,电动机经联轴器带动减速器的三对齿轮z1-z2、z3-z4、z5-z6将转速降低,然后带动曲柄1转动,六杆机构使滑块5克服阻力Fr而运动。为了减小主轴的速度波动,在曲轴A上装有飞轮,在曲柄轴的另一端装有供润滑连杆机构各
运动副用的油泵凸轮。
2.设计要求和内容:
(1)机构的设计及运动分折
已知:中心距x1、x2、y,构件3的上、下极限角,滑块的冲程H,比值CE/CD、EF/DE,各构件质心S的位置,曲柄转速n1。
要求:设计连杆机构,作机构运动简图、机构1~2个位置的速度多边形和加速度多边形、滑块的运动线图。以上内容与后面的动态静力分析一起画在l
号图纸上。
(2)机构的动态静力分析
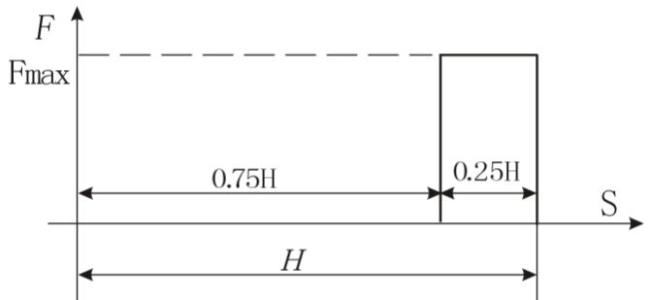
已知:各构件的重量G及其对质心轴的转动惯量JS(曲柄1和连杆4的重力和转动惯量(略去不计),阻力线图(图2)以及连杆机构设计和运动分析中所得的结果。
要求:确定机构一个位置的各运动副中的反作用力及加于曲柄上的平衡力
矩。作图部分亦画在运动分析的图样上。
(3)凸轮机构构设计
已知:从动件冲程H,许用压力角.推程角0,远休止角1,回程角',从动件的运动规律见表9-5,凸轮与曲柄共轴。
要求:按确定凸轮机构的基本尺寸.求出理论廓
线外凸曲线的最小曲率半径ρ。选取滚子半径r,绘制凸轮实际廓线。以上内容作在3号图纸上
二、压床机构的设计
1、连杆机构的设计及运动分析
(1)作机构运动简图并计算各杆长度
表1是机构运动参数
设计内容
单位
符号
数据mm(º)连杆机构的设计及运动分析mmHr/minCEX165X2170
240'60120EFDE1/2n190BS2BCBS3DE1801/41/21/2已知:'60''120
∴∠E1DE2='''60
∴△DE1E2为等边三角形
过D作∠E1DE2的角平分线交E1E2于H,F1F2于I点
∵DE1DE2
∴DH⊥E1E2
∵∠HDQ=∠HDE2+'=30°+60°=90°
∴IHD是一条水平线
∴DI⊥F1F2
∴E1E2∥F1F2
在△E1KF1和△E2GF2中
GE2=KF1
E2F2=E1F1
∠E2GF2=∠E1KF1=90°
∴△E1KF1≌△E2GF2
∴F2G=E1K
∵E1E2=E1G+GE2
F1F2=F1K+KF2
∴E1E2=F1F2=H
∵△E1DE2是等边三角形
∴DE1=DE2=H=180mm∵EFDE=2
∴EF=11DE=×180=90mm22
∵CECD=1/4
∴CD=
连结AD44DE=×180=144mm55
tan=x1y=65/240=0.271
∴15.2
AD=x12y2=6522402248.65mm
在△ADC2和ADC1中,由余弦定理有
AC2=2AD2DC22ADDC2COS(6015.2)
=178.18mm
AC1=AD2C1D22ADC1DCOS(12015.2)
=253.52mm
∴lAB=AC1AC2253.52178.18==37.67mm22
AC1AC2253.52178.18==215.855mm22
lBC=
∵BS21=2BCDS31=2DE
∴BS2=
DS311BC=×215.855=107.925mm2211=DE=×180=90mm22
由上可得:
表2是各干长度ABBCBS2CDDEDS3EF37.67mm215.855mm107.9275mm144mm180mm90mm90mm
(2)机构运动速度分析:
已知:n190rmin;
n121=60rads=902=9.424860rad/s逆时针
vB=1·lAB=9.4248×0.03767≈0.3550m/svC
大小
方向?=vB+vCB?⊥BC0.3550⊥AB⊥CD
vF=vE+vFE
大小?√
√?⊥EF方向铅垂
根据机构简图及曲柄AB所在的位置,选取比例尺v0.005msmm,作速
度多边形
图1是C﹑F的的速度多边形
则在CAD图中可得出:bc=59.3mmef=22.25mm
pf=41.44mmpe=49.02mmps3=24.51mm
根据尺寸及对应关系可求出:vC=uv·=0.005×39.12=0.1956m/s
vCB=uv·bc=0.005×59.3=0.2965m/s
vE=uv·pe=0.005×49.02=0.2451m/s
vF=uv·pf=0.005×41.44=0.2072m/s
vFE=uv·ef=0.005×22.25=0.11125m/s
vS2=uv·ps2=0.005×49.02=0.2451m/svS3=uv·3=0.005×24.51=0.11125m/s∴vCB
2=l=0.2965/0.215855=1.374rad/s(顺时针)
BC
vC
3=l=0.1956/0.144=1.358rad/s(逆时针)
CD
ps2=49.02mmpc=39.12mm
4=
vFE
=0.11125/0.09=1.236rad/slEF
(顺时针)
表3是杆件各点的速度项目数值单位
5
B
6
C
5
E
F
v
1
S2
5
S3
1
9.4248
2
1.374
3
1.358
4
1.236
0.350.190.24
0.207m/s
0.2450.1112
rad/s
图2是速度分析图
(3)机构运动加速度分析:
aB=12lAB=9.424820.03667=3.2573m/s
2
n2
lCB=1.37420.215855=0.4075m/s2aCB=2n
=32lCD=1.35820.144=0.2656m/saCD
2
n2aFElFE=1.23620.09=0.1375m/s=4
2
aC
大小:?方向:?
nttn=aCD+
aCD=aB+aCB+aCB
√C→D
?⊥CD
√B→A
?⊥BC
√C→B
选取比例尺a=0.05msmm,作加速度多边
图3是C﹑F的加速度多边形
则在CAD图中可得:p'f'=47.67mm
p's2'=52.82mmnc'c'=37.12mm
p'c'=45.26mmnd'c'=44..04mm
p's3'=26.475mmp'e'=52.95mm
根据尺寸及对应关系可求出:
2
aC=a·p'c'=0.05×45.26=2.263m/s
aE=a·p'e'=0.05×52.95=2.6475m/s
2
t
=a·c=0.05×37.12=1.865m/saCB
2
t
=a·nd'c'=0.05×44.04=2.202m/saCD
2
aF=nt
aE+aFE+aFE
大小:方向:
?√
√√
√F→E
?⊥EF
aF
''
pf=0.05×47.67=2.3835=a
·
m/s2
2
as2=a·as3=a·
p's2'3=0.05×52.82=2.641m/s
=0.05×26.475=1.3238m/s
2
2t
2=aCB/lCB=1.865/0.215855=8.64m/s(逆时针)
2t3=acd/lCD=2.202/0.144=15.292m/s
(顺时针)
表4是杆件各点的加速度项目数值单位
a
B
a
C
a
E
aF
2.384
aS2
2.641
aS3
1.324
2
rad/s2
3
3.25732.2632.6475
m/s2
8.6415.292
(4)机构动态静力分析
表5是连杆的机构动态静力及转动惯量
G2
G3G5
Frmax
JS
2
JS
3
方案I单位
66044030040000.280.085
N
kgm2
1.各构件的惯性力,惯性力矩:
Fg2=m2.as2=G2.as2/g=660×2.641/9.8=177.86N(与as2方向相同)Fg3=m3.as3=G3.as3/g=440×1.324/9.8=59.445N(与as3方向相反)Fg5=m5.aF=G5.aF/g=300×2.384/9.8=72.98N(与aF方向相反)Fr=Frmax/10=4000/10=400N
MI2=JS2.2=0.28×8.64=2.419N.m
(顺时针)(逆时针)
MI3=JS3.3=0.085×15.292=1.230N.m
hg2=MI2/Fg2=2.419/177.86=13.60mmhg3=MI3/Fg3=1.230/59.445=20.69mm
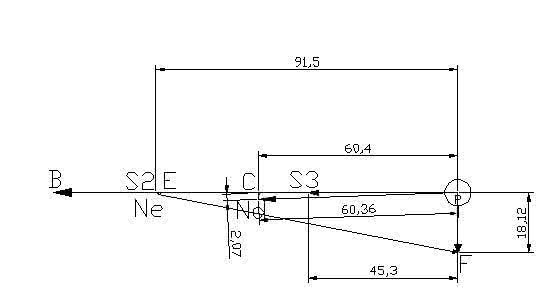
2.计算各运动副的反作用力
(1)分析构件5
对构件5进行力的分析,选取比例尺F=10Nmm
,作其受力图
图4是杆件5的力的多边形
构件5力平衡:Fg5+Fr+G5+R45+R65=0则R45=-F.l45=-10×77.72=-777.2N
R43=-R45=777.2N
R65=F.l65=10×7.75=77.5N
图5是构件4所受力分析
对构件4进行力的分析,其受力图如上图平衡有:F34+F54=0
∴F34=-F54=F45=777.2N
(2)分析构件
2、3
图6是构件2受力分析
单独对构件2进行分析:
t
杆2对C点求力矩,可得:R12×lBC-G2×lg2-Fg2×lFg2=0tR12×0.215855-660×0.046-325.892×0.13=0tR12=337.01N
单独对构件3分析:
图7是杆件3受力分析
杆3对C点求矩得:
t
×lCD-G3×hg3+R43×hR43-Fg3×hFg3=0R63
t-R63×0.144-440×0.04851+474.4×0.02985-152.922×0.0291=0t解得R63=80.87N
对杆组2、3进行分析:
tntn
+Fg2+G2+R12+R12+R63=0R43+Fg3+G
3+R63
大小:√方向:√
√√
√√
√√
√√
√√
√√
??
√√
选取比例尺F=10Nmm,作其受力图
n
则R12=10×63.37=633.7N;
t
R63=10×32.51=325.1N.
图8是杆件2﹑3力的多边形
(3)求作用在曲柄AB上的平衡力矩Mb:
Mb=FR21×l=717.7×0.02177=15.63N.mR61=R21=717.7
N.
图9是杆件AB受力分析
表6是各杆件所受得力及力矩项目数值单位项目数值单位
tR63
Fg2Fg3Fg5MI2MI3MbR63
177.8659.4572.982.421.2315.63325.1
N
nR12
tR12
Nm
R34
R45
R56
N
R61
80.87633.7337.1777.2777.277.5717.7
N
三、凸轮设计
表7是凸轮机构的参数
符号单位方案1
H
mm17
001
'
30552585
有Hr0=0.45,即有r0=H0.45=0.45=37.778mm
取r0=38mm取rr=4mm
在推程过程中:由a=H
2
2
2得
20
当0=55时,且022.5,则有a0,即该过程为加速推程段,当0=55时,且22.5,则有a0,即该过程为减速推程段
1cos所以运动方程Sh
02
表8表示在推程阶段与S对应关系
S
051015202530
35
0.344
40
1.349
45
2.934
50
4.969
55
7.299.709
S
12.03114.06715.650mm
16.65517.0
单位
在回程阶段,由aH
2
2
'2'
2
当0'=85时,且042.5,则有a0,即该过程为减速回程段,当0'=85时,且42.5,则有a0,即该过程为加速回程段
1cos所以运动方程Sh
0'2
表9表示在回程阶段与S对应关系
S
80
85
90
95
100
105
110
17
115
16.855
120
16.42
125
15.727
130
14.782
135
13.623
140
12.289
145
S
10.826
150
9.285
155
7.776
160
6.176
165
4.1123.3782.219
S
1.2730.574
mm
0.1450
单位
图10是凸轮轮廓线
四﹑心得体会
机械原理课程设计接近尾声,经过两周的奋战我们的课程设计终于完成了,课程设计是我们专业课程知识综合应用的实践训练,是我们迈向社会,从事职业工作前一个必不少的过程.”千里之行始于足下”,通过这次课程设计,我深深体会到这句千古名言的真正含义.我们今天认真的进行课程设计,学会脚踏实地迈开这一步,就是为明天能稳健地在社会大潮中奔跑打下坚实的基础.
说实话,课程设计真的有点累.然而,当我一着手整理自己的设计成果,漫漫回味这两周的心路历程,一种少有的成功喜悦即刻使倦意顿消.
或许很多人认为课程设计两周时间很长,可我们却丝毫未感觉到时间的充裕,除了在寝室休息食堂吃饭其他时间就窝在基地做课设。这两周的时间大致的安排是第一周做选定题目、背景调查、需求分析和概念设计,这个过程中我们在网上收集资料,选定方向,提出初步的方案,经过几次不断地反复修改和讨论,我们基本确定了题目和实现原理。第二周的任务就着重在详细设计。我想这是我最充实的几天,经过概念设计后我们对方案都认为有深刻的了解,我们使用的机构类型比较多,这促使我对机械原理的理论知识有了新的理解,槽轮中槽数的选择和拨盘圆销的选择、凸轮的轮廓设计和运动性能分析及其优化、齿轮的模数齿数的选择和变位系数的计算、曲柄滑块中急回特性的应用和杆长的设计,这每一点都要用理论来指导,例如,我以前从来真正不明白为什么变位齿轮的重要性,中心矩不是设计好的吗?为什么还要凑呢?只有自己亲手设计东西才知道这其中的缘由,所以也真正认识到学好机械原理的重要性。
我收获的另外一点或许是我对设计方法的认识,对CAD的认识,之前学过一些CAD软件,也跟老师做过一些建模和软件测试的项目,而真正这么完整的自己用CAD软件细致的表达出自己的设计思想还是第一次,CAD画图,最重要的是什么?对这个问题,每个人都有可能理解不同,但在我看来,最重要的是时时刻刻记住自己使用CAD画图的目的是什么。我们进行工程设计,不管是什么专业、什么阶段,三维的或者二维的实际上都是要将某些设计思想或者是设计内容,表达、反映到设计文件上。而图,就是一种直观、准确、醒目、易于交流的表达形式。所以我们完成的东西(不管是最终完成的设计文件,还是作为条件提交给
其他专业的过程文件,一定需要能够很好的帮助我们表达自己的设计思想、设计内容。有了这个前提,我们就应该明白,好的计算机建模应该具有以下两个特征:清晰、准确。
由于以前的一些经验,这次我没有按照传统的从零件设计,然后装配、检验、运动仿真,而是尝试了一种耳熟能详但是没有实践过的设计方法:自顶向下设计。这是一种逐步求精的设计的过程和方法。对要方案进行分解,定义出各个模块和机构,而将其中未解决的问题作为一个子任务放到下一层次中去解决。这样逐层、逐个地进行定义、设计和调试。按自顶向下的方法设计时,我们首先要对所设计的系统要有一个全面的理解.然后从顶层开始,也就是从装配体开始连续地逐层向下分解,分解到到子装配,最终到每一个零件的参数和定位以及标准件的选择.这样设计速度明显会加快(这也是我们能这么短时间内完成建模的一个重要原因),而且各个模块之间相互独立,耦合性低,最终也不回出现各个模块之间运动矛盾或者干涉等问题出现。
虽然这是我刚学会走完的第一步,也是人生的一点小小的胜利,然而它令我感到自己成熟的许多,另我有了一中”春眠不知晓”的感悟.通过课程设计,使我深深体会到,干任何事都必须耐心,细致.也让我体会到了合作与双赢的快乐。
我的心得也就这么多了,总之,不管学会的还是学不会的的确觉得困难比较多,真是万事开头难,不知道如何入手。最后终于做完了有种如释重负的感觉。此外,还得出一个结论:知识必须通过应用才能实现其价值!有些东西以为学会了,但真正到用的时候才发现是两回事,所以我认为只有到真正会用的时候才是真的学会了!
五、参考文献:
1.陆风仪主编.机械原理课程设计.北京.机械工业出版社.2002
2.孙恒、陈作模、葛文杰主编.机械原理.北京.高等教育出版社.2006
3.刘鸿文.理论力学(第五版)[M],北京:高等教育出版社,2010
4.刘小年.AutoCAD计算机绘图基础[M],湖南:湖南大学出版社,2010
5.匡乐满.大学物理(第一册)[M],北京:北京邮电大学出版社,2010
百度搜索“爱华网”,专业资料,生活学习,尽在爱华网