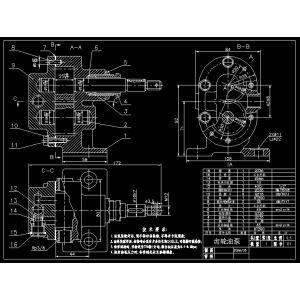
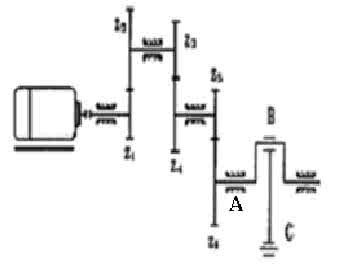
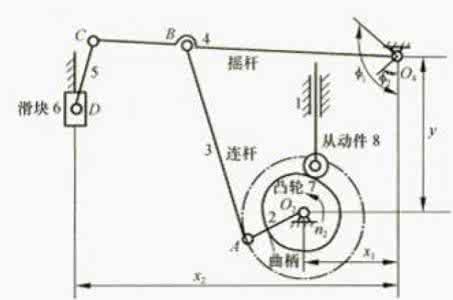
齿轮 Z6与曲柄共轴。 五、要求:
1)用C语言编写程序计算
①中心距a(圆整尾数为5或0或双数); ②啮合角; ③ 按小轮不发生根切为
、原则分配变位系数x1、x2; ④计算基圆直径db1、db2,分度圆直径d1、d2,节圆直径d1,分度圆齿厚S1、S2,基圆齿厚Sb1、Sb2,齿顶圆齿厚Sa1、Sa2,节圆展角;⑤重d2
合度ε。
2)计算出齿形曲线,在2号图纸上绘制齿轮传动的啮合图。 3)编写出计算说明书。
指导教师:郝志勇 席本强
开始日期: 2011年 6 月 26 日 完成日期:2011年 6 月30 日
目录
1.设计内容及要求·····························1
2.齿轮啮合原理图·····························2
3.数学模型···································3
4.程序说明图·································5
5.程序列表及其运行结果·······················6
6.设计总结··································14
7.参考文献··································15
1.设计内容级要求
齿轮的设计
已知:齿数Z5、Z6,模数m,分度圆压力角α,齿数为正常齿制,工作情况为开式传动,轮齿Z6与曲柄共轴。
要求:
1)用C语言编写程序计算
①中心距a′(圆整尾数为5或0或双数); ②啮合角α′;
③按小齿轮不发生根且为原则分配变为系数x1、x2; ④计算基圆直径db1、db2,分度圆直径d1、d2,节圆直径d`1、d`2,分度圆齿厚s1、s2,基圆齿厚sb1、sb2,齿顶圆齿厚sa1、sa2,节圆展角ѳ; ⑤重合度є;
2)计算出齿形曲线,在2号图纸上绘制齿轮传动的啮合图。 ⑶编写出计算说明书。
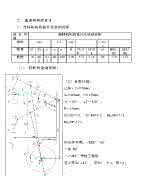
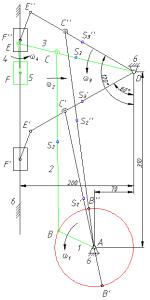
2.齿轮齿廓合原理图
3.齿轮机构的数学模型
㈠渐开线直齿圆柱齿轮基本公式 i=z2/z1
a=[1/2*m*(z1+z2)*1/5+1]*5
=arccos(a*cos/a) d=mz d=mz
1
1
22
d=d*cos d=d*cos
b1
1
b2
2
*
=[+2(ha+x1)]*m da1z1
*=[+2(ha+x2)]*m da2z2
**=[-2(++hax1c)]*m df1z1
**=[-2(++hax2c)]*m df2z2
d=dcos/cos d=dcos/cos
i1
1
i2
2
S=1/2m+2xmtg
1
1
S=1/2m+2xmtg
2
2
㈡齿轮副传动质量指标 ⑴齿轮是否根切
①标准齿轮不根切的最小齿数
*2
=2/Zminhasin
②不根切最小变位系数
*=X1minha(Zmin-z1)Zmin
*
=X2minha(Zmin-z2)Zmin
⑵ 重合度
=1/2[z1(tga1-tg
)+z2(tga2-tg)]
其中:a1=arccos(db1/da1) a2=arccos(db2/da2) cos=m(z1+z2)/2acos 一般情况应保证≥1.2。 ⑶齿顶厚
S=Sd/d-d(inv-inv)
a1
1
a1
1
a1
a1
S=Sd/d-d(inv-inv)
a2
2
a2
2
a2
a2
⑷基圆齿厚
S=Sd/d-d(inv- inv)
b1
1
b1
1
b1
b1
S=Sd/d-d(inv- inv)
b2
1
b2
1
b2
b2
⑸展角
=tg(arccosd/d)-arccosd/d =tg(arccosd/d)-arccosd/d
1
b1
i1
b1
i1
2b2
i2
b2
i2
4.程序框图
5.程序清单及运行结果
⑴程序清单 #include
#define t 20*3.14/180 /*yalijiao,unit:rad*/ #define m 6 /*moshu*/ #define hax 1.0 #define cx 0.25 #define Zmin 17.0 #define pi 3.14 main() { int a,ai;
double ti; /*niehejiao*/ double x5,x6,xh;
double db5,db6; /*jiyuanzhijing*/ double d5,d6; /*fenduyuanzhijing*/ double ha5,ha6; /*chidinggao*/ double hf5,hf6; /*chigengao*/ double df5,df6; /*chigenyuanzhijing*/ double di5,di6; /*jieyuanzhijing*/
double da5,da6; /*chidingyuanzhijing*/ double S5,S6; /*chihou*/ double Sb5,Sb6; /*jiyuanchihou*/ double Sa5,Sa6; /*chidingyuanchihou*/ double o5,o6; /*jieyuanzhanjiao*/ double e; /*chonghedu*/
double y; /*fenduyuanfenlixishu*/ double Xmin5,Xmin6; /*zuixiaobianweixishu*/ double cdm; /*chidinggaobiandongxishu*/ int j,i;
a=m*(z5+z6)/2; printf(
printf(
printf(
printf(
db5=m*z5*cos(t); db6=m*z6*cos(t);
printf(
printf(
Xmin6=hax*(Zmin-z6)/Zmin; (mm)nn
xh=0.5*(tan(ti)-ti-(tan(t)-t))*(z5+z6)/tan(t); printf(
if(x6
printf(
printf(
da6=d6+2*ha6;
df5=d5-2*hf5;
df6=d6-2*hf6;
S5=0.5*pi*m+2*x5*m*tan(t);
S6=0.5*pi*m+2*x6*m*tan(t);
Sb5=S5*db5/d5-db5*(tan(acos(db5/db5))-acos(db5/db5)-(tan(t)
-t));
Sb6=S6*db6/d6-db6*(tan(acos(db6/db6))-acos(db6/db6)-(tan(t)
-t));
Sa5=S5*da5/d5-da5*(tan(acos(db5/da5))-acos(db5/da5)-(tan(t)
-t));
Sa6=S6*db6/d6-da6*(tan(acos(db6/da6))-acos(db6/da6)-(tan(t)
-t));
o5=tan(acos(db5/di5))-acos(db5/di5);
o6=tan(acos(db6/di6))-acos(db6/di6);
e=(z5*(tan(acos(db5/da5))-tan(ti))+z6*(tan(acos(db6/da6))-t
an(ti)))/(2*pi);
if((S5>cx*m)&&(S6>cx*m)&&(Sb5>cx*m)&&(Sb6>cx*m)&&(Sa5>cx*m)
&&(Sa6>cx*m)&&(e>1.2))
{
printf(
printf(
printf(
printf(
printf(
printf(
printf(
printf(
printf(
printf(
}
}
}
⑵程序运行结果
a=135
ai=140 (mm)
ti=0.437 (rad)
y=0.833
d5=60.000,d6=210.000 (mm)
db5=56.385,db6=197.348 (mm)
di5=62.222,di6=217.778 (mm)
Xmin5=0.4118 (mm)
Xmin6=-1.0588 (mm)
xh=x5+x6=0.937
x5=0.412,x6=0.526 (mm)
cdm=0.104
ha5=7.846,ha6=8.529 (mm)
hf5=5.029,hf6=4.346 (mm)
da5=75.693,da6=227.059 (mm)
df5=49.941,df6=201.307 (mm)
S5=11.217,S6=11.714 (mm)
Sb5=11.381,Sb6=13.945 (mm)
Sa5=2.772,Sa6=2.651 (mm)
o5=0.03004,o6=0.03004 (rad)
e=1.2535171846914954000000000000000
x5=0.452,x6=0.486 (mm)
cdm=0.104
ha5=8.086,ha6=8.289 (mm)
hf5=4.789,hf6=4.586 (mm)
da5=76.173,da6=226.579 (mm)
df5=50.421,df6=200.827 (mm)
S5=11.392,S6=11.540 (mm)
Sb5=11.545,Sb6=13.781 (mm)
Sa5=2.576,Sa6=2.777 (mm)
o5=0.03004,o6=0.03004 (rad)
e=1.2462562884050261000000000000000
x5=0.492,x6=0.446 (mm)
cdm=0.104
ha5=8.326,ha6=8.049 (mm)
hf5=4.549,hf6=4.826 (mm)
da5=76.653,da6=226.099 (mm)
df5=50.901,df6=200.347 (mm)
S5=11.567,S6=11.365 (mm)
Sb5=11.709,Sb6=13.617 (mm)
Sa5=2.375,Sa6=2.899 (mm)
o5=0.03004,o6=0.03004 (rad)
e=1.2386576453645259000000000000000
x5=0.532,x6=0.406 (mm)
cdm=0.104
ha5=8.566,ha6=7.809 (mm)
hf5=4.309,hf6=5.066 (mm)
da5=77.133,da6=225.619 (mm)
df5=51.381,df6=199.867 (mm)
S5=11.741,S6=11.191 (mm)
Sb5=11.873,Sb6=13.453 (mm)
Sa5=2.168,Sa6=3.018 (mm)
o5=0.03004,o6=0.03004 (rad)
e=1.2307225583191714000000000000000
x5=0.572,x6=0.366 (mm)
cdm=0.104
ha5=8.806,ha6=7.569 (mm)
hf5=4.069,hf6=5.306 (mm)
da5=77.613,da6=225.139 (mm)
df5=51.861,df6=199.387 (mm)
S5=11.916,S6=11.016 (mm)
Sb5=12.037,Sb6=13.289 (mm)
Sa5=1.955,Sa6=3.135 (mm)
o5=0.03004,o6=0.03004 (rad)
e=1.2224517403518671000000000000000
x5=0.612,x6=0.326 (mm)
cdm=0.104
ha5=9.046,ha6=7.329 (mm)
hf5=3.829,hf6=5.546 (mm)
da5=78.093,da6=224.659 (mm)
df5=52.341,df6=198.907 (mm)
S5=12.090,S6=10.841 (mm)
Sb5=12.201,Sb6=13.125 (mm)
Sa5=1.736,Sa6=3.248 (mm)
o5=0.03004,o6=0.03004 (rad)
e=1.2138453318745659000000000000000
x5=0.652,x6=0.286 (mm)
cdm=0.104
ha5=9.286,ha6=7.089 (mm)
hf5=3.589,hf6=5.786 (mm)
da5=78.573,da6=224.179 (mm)
df5=52.821,df6=198.427 (mm)
S5=12.265,S6=10.667 (mm)
Sb5=12.365,Sb6=12.961 (mm)
Sa5=1.511,Sa6=3.358 (mm)
o5=0.03004,o6=0.03004 (rad)
e=1.2049029135696958000000000000000
Press any key to continue
6.设计总结
通过此段时间的课程设计,我懂得实践是检验真理的唯一标准,通过这次的机械原理课程设计,我把学过的理论知识结合了实践解决机械工程上的一些问题,提高我自己的创新能力。真是受益匪浅,使我对机械设计有了深入的了解,对机械专业的有了更深入的了解。使我对变位齿轮的设计、制造和加工有了系统的掌握。
在设计齿轮过程中,复习了有关齿轮的知识,又学到了有关齿轮的新知识,由于有些齿轮大小等一些因素的限制,齿轮的齿
数无法达到不根切的最小齿数或一些配合方面的要求,所以需要对所加工的齿轮进行变位,由于正常齿的ha和c是不变的,所以齿的大小等数据不变,所以在设计时只能增大中心距以达到不根切的的。由于分度圆的变化,齿轮的一些其它部分的尺寸也会随之而变化,例如齿顶高、齿根高、分度圆、等一些齿轮基本参数都会发生变化,这些尺寸均可同过公式,由变位系数来确定。而边位齿轮传动部分的尺寸基本不发生变化,不会对传动产生影响,而且解决了齿轮齿数小于最小不根切齿数时的根切问题。
因此,在老师的细心辅导下和同学的热心帮助下,我的课程设计完成了,在这次设计中,我学到了很多东西,知道了机械设计制造专业的的任务。这对我将来的发展,起至关重要的作用。
7.参考文献
1.《机械原理》 孙桓、陈作模、葛文杰,高等教育出版社,2005.12
2.《C语言程序设计》吴德成,吉林大学出版社,2006.2
3.《计算机图形学》罗笑南,王若梅,中山大学出版社,1996.10
4.《C语言典型零件CAD》王占勇,东北大学出版社,2000.9
百度搜索“爱华网”,专业资料,生活学习,尽在爱华网