相关解答一:机器人是由哪些部分组成的?
机器人系统的构成
机器人系统的结构由机器人的机构部分、传感器组、控制部分及信息处理部分组成。机器人的外貌有的像人,有的却并不具有人的模样,但其组成与人很相似。机构 部分包括机械手和移动机构,机械手相当于人手一样,可完成各种工作;移动机构相当于人的脚,机器人靠它来"走路"。感知机器人自身或外部环境变化信息的传 感器是它的感觉器官,相当于人的眼、耳、皮肤等,它包括内传感器和外传感器。电脑是机器人的指挥中心,相当于人脑或中枢神经,它能控制机器人各部位协调动 作;信息处理装置(电子计算机),是人与机器人沟通的工具,可根据外界的环境变化、灵活变更机器人的动作。 zhidao.baidu.com/question/432772393.html
相关解答二:机器一般由什么组成?
【机器的组成】机器一般由四部分组成:
1、动力部分:是机器能量的来源,它将各种能量转变为机器能(又称机械能)。
2、工作部分:直接实现机器特定功能、完成生产任务的部分。
3、传动部分:按工作要求将动力部分的运动和动力传递、转换或分配给工作部分的中间装置。
4、控制部分:是控制机器起动、停车和变更梗动参数的部分。
【机器】是由各种金属和非金属部件组装成的装置,消耗能源,可以运转、做功。它是用来代替人的劳动、进行能量变换、信息处理、以及产生有用功。机器贯穿在人类历史的全过程中。但是近代真正意义上的“机器”,却是在西方工业革命后才逐步被发明出来。
相关解答三:机器主要由哪四部分组成
动力部分、控制部分、执行部分、传动部分
相关解答四:机器人都有哪些组成部分
机器人系统的构成机器人系统的结构由机器人的机构部分、传感器组、控制部分及信息处理部分组成。机器人的外貌有的像人,有的却并不具有人的模样,但其组成与人很相似。机构 部分包括机械手和移动机构,机械手相当于人手一样,可完成各种工作;移动机构相当于人的脚,机器人靠它来走路。感知机器人自身或外部环境变化信息的传 感器是它的感觉器官,相当于人的眼、耳、皮肤等,它包括内传感器和外传感器。电脑是机器人的指挥中心,相当于人脑或中枢神经,它能控制机器人各部位协调动 作;信息处理装置(电子计算机),是人与机器人沟通的工具,可根据外界的环境变化、灵活变更机器人的动作。
相关解答五:电脑机器码怎么组成的可以改吗
您说的是mac地址吗,这个是可以改的
在网上搜一下 mac地址修改器
我用过,很简单的软件 可以随便改
相关解答六:简述机器指令及组成。 5分
答:编码表示的计算机可以直接识别和处理的基本操作称为机器指令。
机器指令通常由操作码和操作数两部分组成。
根据机器指令功能,可以分为数据处理类,数据传送类,程序控制类和CPU状态管理类。根据机器指令格式可以分为三地址,二地址,单地址和零地址四类。
讲义上的
相关解答七:机器人由哪些部件组成
大的来说就是硬件和软件
一般来说是有机械部分、驱动部分、控制部分及传感部分组成
相关解答八:一部完整的机器由( )( )( )( )几部分组成
输入、运算、储存、输出
相关解答九:工业机器人的组成结构?
浙江瓦力工业机器人一般是由驱动装置、执行机构、检测装置和控制系统和复杂机械等组成。
驱动装置。是驱使执行机构运动的机构,按照控制系统发出的指令信号,借助于动力元件使机器人进行动作。它输入的是电信号,输出的是线、角位移量。机器人使用的驱动装置主要是电力驱动装置,如步进电机、伺服电机等,此外也有采用液压、气动等驱动装置。
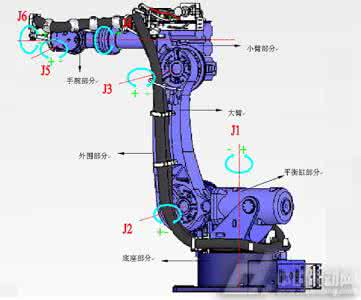
执行机构。即机器人本体,其臂部一般采用空间开链连杆机构,其中的运动副(转动副或移动副)常称为机器人高科技产物(18张)关节,关节个数通常即为机器人的自由度数。根据关节配置型式和运动坐标形式的不同,机器人执行机构可分为直角坐标式、圆柱坐标式、极坐标式和关节坐标式等类型。
控制系统。一种是集中式控制,即机器人的全部控制由一台微型计算机完成。另一种是分散(级)式控制,即采用多台微机来分担机器人的控制,如当采用上、下两级微机共同完成机器人的控制时,主机常用于负责系统的管理、通讯、运动学和动力学计算,并向下级微机发送指令信息;作为下级从机,各关节分别对应一个CPU,进行插补运算和伺服控制处理,实现给定的运动,并向主机反馈信息。
检测装置的作用。是实时检测机器人的运动及工作情况,根据需要反馈给控制系统,与设定信息进行比较后,对执行机构进行调整,以保证机器人的动作符合预定的要求。
相关解答十:机器人由那几部分组成,各部分什么功能?
机器人由三大部分六个子系统组成。三大部分是机械部分、传感部分和控制部分。六个子系统是驱动系统、机械结构系统、感受系统、机器人一环境交换系统、人机交换系统和控制系统。
驱动系统,要使机器人运作起来,各需各个关节即每个运动自由度安置传动装置。这就是驱动系统。驱动系统可以是液压传动、气压传动、电动传动、或者把它们结合起来应用综合系统,可以是直接驱动或者通过同步带、链条、轮系、谐波齿轮等机械传动机构进行间接传动。
机械结构传动,工业机器人的机械结构系统由机座、手臂、末端操作器三大部分组成,每一个大件都有若干个自由度的机械系统。若基座不具备行走机构,则构成行走机器人;若基座不具备行走及弯腰机构,则构成单机器人臂。手臂一般由上臂、下臂和手腕组成。末端操作器是直接装在手腕上的一个重要部件,它可以是二手指或多手指的手抓,也可以是喷漆枪、焊具等作业工具。
感受系统由内部传感器模块和外部传感器模块组成,用以获得内部和外部环境状态中有意义的信息。智能传感器的使用提高了机器人的机动性、适应性和智能化的水准。人类的感受系统对感知外部世界信息是极其灵巧的,然而,对于一些特殊的信息,传感器比人类的感受系统更有效。
机器人一环境交换系统是现代工业机器人雨外部环境中的设备互换联系和协调的系统。工业机器人与外部设备集成为一个功能单元,如加工单元、焊接单元、装配单元等。当然,也可以是多台机器人、多台机床或设备、多个零件存储装置等集成为一个去执行复杂任务的功能单元。
人工交换系统是操作人员与机器人控制并与机器人联系的装置,例如,计算机的标准终端,指令控制台,信息显示板,危险信号报警器等。该系统归纳起来分为两大类:指令给定装置和信息显示装置。
控制系统的任务是根据机器人的作业指令程序以及传感器反馈回来的信号支配机器人的执行机构去完成规定的运动和功能。假如工业机器人不具备信息反馈特征,则为开环控制系统;若具备信息反馈特征,则为闭环控制系统。根据控制原理,控制系统可分为程序控制系统、适应性控制系统和人工智能控制系统。根据控制运行的形式,控制系统可分为点位控制和轨迹控制。
百度搜索“爱华网”,专业资料,生活学习,尽在爱华网