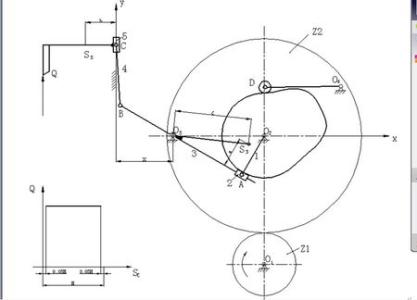
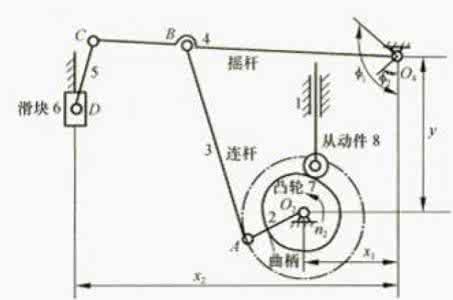
设计题目: 六杆机构的运动分析
姓 学
名: 号:
XXX 0806100322 机械 100X 班 1 组 郑志莲 2012.7.2
班级分组: 指导老师: 完成日期:
1
目录
一、原始数据-----------------------------------------------------------3
二、小组点分配 -------------------------------------------------------4
三、连杆机构综合-----------------------------------------------------5
四、运动分析-----------------------------------------------------------7
五、力分析-------------------------------------------------------------13
六、小组总结----------------------------------------------------------19
七、课程设计个人心得与总结-------------------------------------20
八、参考文献----------------------------------------------------------21
2
一、原始数据
设计内容 单位 符号 数据 X1 130 mm X2 70 y 310 (º)
连杆机构的设计及运动分析 mm
11 3
r/min CE/CD 1/2 EF/DE 1/4 n1(顺) BS2/BC 90 1/2 DS3/DE 1/2
ψ
1 3
ψ
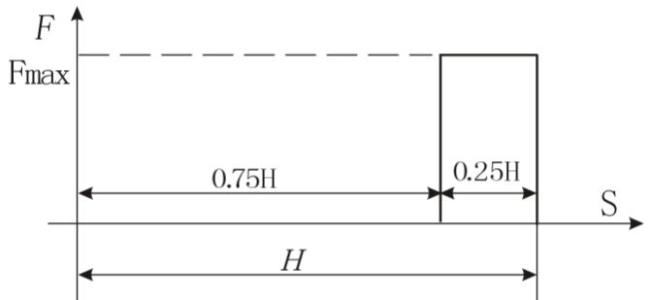
H 210
60
120
G2=1600 N G3=1040 N G5= 840 N Js2=1.35 Kgm2 JS3=0.39 Kgm2 Prmax=11000 N
3
二、小组点的分配
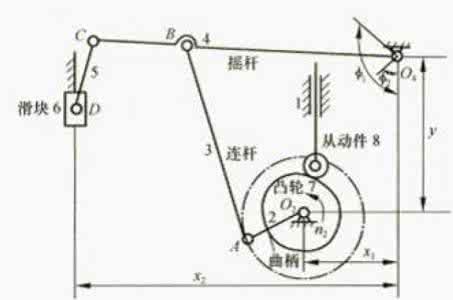
1、 小组成员: 本小组成员由学号在班级排在前十名的同学组成, 他们是:张启东(组长) 、贺达、扶正夫、李岳、陈国强、吴士榕、 赵增、刘潇、马慧妍、陈青健 十位同学组成。 2、小组点的分配:XXX( 0o 、180o ) XX( 20o 、200o ) XXX( 40o、220o ) XX( 60o、240o )XXX(80o、260o) XXX( 100o、280o ) XX( 120o、300o )XX( 140o、320o ) XXX( 160o、340o ) XXX( 两个极限位置 ) 3、所画点机构简图
0o 机构简图
180o 机构简图
4
三、连杆机构综合
1、求杆长
设计内容 单位 符号 数据 X1 70 mm X2 200 y 310 (º) 连杆机构的设计及运动分析 mm
11 3
r/min CE/CD 1/2 EF/DE 1/4 n1 90 BS2/BC 1/2 DS3/DE 1/2
ψ
1 3
ψ
H 210
60
120
已知:X1=70mm,X2=200mm,Y=310mm,
ψ = 60 °,ψ
3
1
11 3
= 120 ° , H= 210mm , CE/CD=1/2, EF/DE=1/4, BS2/BC=1/2,
DS3/DE=1/2。 由条件可得;∠EDE'=60° ∵DE=DE' ∴△DEE'等边三角形 过 D 作 DJ⊥EE',交 EE'于 J,交 F1F2 于 H ∵∠HDI=1/2∠EDE''+∠IDE'' =60°+30°/2 =90° ∴HDJ 是一条水平线 ∴DH⊥FF' ∴FF'∥EE' 过 F'作 F'K⊥EE' 过 E'作 E'G⊥FF', ∴F'K=E'G 在△FKE 和△E'GF'中, KE=GF', FE=E'F', ∠FKE=∠E'GF'=90° ∴△F'KF'≌△E'GF' ∴KE= GF' ∵EE'=EK+KE', FF'=FG+GF' ∴EE'=FF'=H ∵△DE'E 是等边三角形 ∴DE=EF=H=210mm ∵EF/DE=1/4, CE/CD=1/2 ∴EF=DE/4=210/4=52.5mm CD=2*DE/3=2*210/3=140mm 连接 AD,有 tan∠ADI=X1/Y=70/310 又 ∵ AD= ∴在三角形△ADC1 和△ADC2 中,由余弦定理得: AC'= AC''= =383.44mm =245.42mm mm
5
∴AB=(AC'-AC'')/2=69.01mm BC=(AC'+AC'')/2=314.43mm ∵BS2/BC=1/2, DS3/DE=1/2 ∴ BS2=BC/2=314.46/2=157.22mm DS3=DE/2=210/2=105mm
由上可得:
AB 69.01mm
BC 314.42mm
BS
2 157.21mm
CD 140mm
DE 210mm
DS3 105mm
EF 52.5mm
6
四、运动分析
1、0o 的运动速度分析 已知:n1=90r/min;
1
n1 60
90 60
=
2
rad/s =
2
=9.425 rad/s
逆时针
v
B
= 1 ·lAB = 9.425×0.06901m/s≈0.650 m/s
v =
C
v
B
+
v
CB
大小 ? 方向 ⊥CD
0.65 ⊥AB
? ⊥BC
选取比例尺μ v=0.005m/s/mm,作速度多边形
v v v v v
C
=
u u
v ·
pc
=0.005×130.08 mm =0.650m/s
CB
=
v ·
bc
=0.005×4.54 mm =0.023m/s
E
=
u
v ·
pe
=0.005×195.12 mm =0.976m/s
F
=
u
v ·
pf
=0.005×193.68 mm =0.968m/s
FE
=
u
v ·
ef
=0.005×6.94 mm =0.035m/s
v v
S
2
= =
u u
v ·
ps 2 =0.005×130.02 mm =0.650m/s
ps 3 =0.005×97.48 mm =0.487m/s
S3
v ·
∴ =
2
v CB l BC
=0.073rad/s (顺时针)
7
ω =
3
vC l CD
v FE l EF
=4.643rad/s =0.667rad/s
(顺时针) (顺时针)
ω =
4
项 目 数 值 单 位
B
C
E
F
v
S
2
S3
1
2
3
4
0.650
0.650
0.976
0.968 m/s
0.650
0.487
9.425
0.073
4.643
0.667
rad/s
2、0o 的运动加速度分析
a
B n
=ω 1 lAB=6.130m/s
2 2
2
2
a =ω 2 lBC=0m/s 2 2 a =ω 3 lCD=3.018m/s
CB n CD
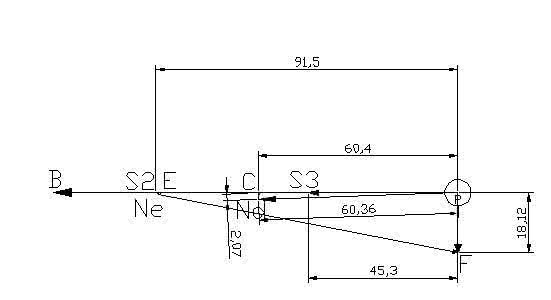
+a a = a + a =a + a 大小: ? √ ? √ √ ? 方向: ? C→D ⊥CD B→A C→B ⊥BC 选取比例尺μ a=0.05 m/s2/mm,作加速度多边形图
n t n t C CD CD B CB CB
8
a =u a · p 'c' =0.05×60.4 mm=3.02m/s2
C
=u a · p 'e' =0.05×91.5 mm=4.53m/s2
a
E
a = u a · nC c ' =0.05×62.2 mm=3.11 m/s2
t CB
'
a =u a · nd c' =0.05×2.07 mm=0.104m/s2
t CD
'
大小 方向
a ? √
F
= a √ √
E
+ a √
+ a ? F→E ⊥EF
EF
n
t
EF
a =u
F
a ·
p ' f ' =0.907 m/s2
a =u
S2 S3
a ·
p ' s 2 =4.575m/s2
'
2
'
a = u a · p ' s 3 =2.265m/s 2 = a /lCB=9.893rad/s
t
2
CB
3
=
a
t CD
/lCD=0.739rad/s2
项目 数值 单位
a
B
a
C
a
E
a
F
a
S2
a
S3
2
3
6.130
3.020
4.530 m/s 2
0.858
4.575
2.265
9.893
0.739
rad/s 2
9
3、180o 的运动速度分析 已知:n1=90r/min;
1
n1 60
90 60
=
2
rad/s =
2
=9.425 rad/s
逆时针
v
B
= 1 ·lAB = 9.425×0.06901m/s≈0.650 m/s
v =
C
v
B
+
v
CB
大小 ? 方向 ⊥CD
0.65 ⊥AB
? ⊥BC
选取比例尺μ v=0.005m/s/mm,作速度多边形
v v v v v
C
=
u
v ·
pc
=0.005×120.97 mm =0.650m/s
CB
=
u
v ·
bc
=0.005×26.85 mm =0.605m/s
E
=
u
v ·
pe
=0.005×181.45mm =0.907/s
F
=
u
v ·
pf
=0.005×182.93 mm =0.912m/s
FE
=
u
v ·
ef
=0.005×34.89 mm =0.174m/s
v v
S
2
= =
u u
v ·
ps 2 =0.005×124.91 mm =0.625m/s
ps 3 =0.005×90.73 mm =0.454m/s
S3
v ·
∴ =
2
v CB l BC
vC l CD
=0.426rad/s (顺时针) =4.321rad/s (逆时针)
ω =
3
10
ω =
4
v FE l EF
=3.314rad/s
(顺时针)
项 目 数 值 单 位
B
C
E
F
v
S
2
S3
1
2
3
4
0.650
0.605
0.907
0.912 m/s
0.625
0.454
9.425
0.426
4.321
3.31
4
rad/s
4、180o 的运动加速度分析
a
B n
=ω 1 lAB=6.130m/s
2
2
2 2
a =ω 2 lBC=0.057m/s 2 2 a =ω 3 lCD=2.614m/s
CB n CD
+a a = a + a =a + a 大小: ? √ ? √ √ ? 方向: ? C→D ⊥CD B→A C→B ⊥BC 选取比例尺μ a=0.05 m/s2/mm,作加速度多边形图
n t n t C CD CD B CB CB
11
a =u a · p 'c' =0.05×86.15 mm=4.31m/s2
C
=u a · p 'e' =0.05×129.23 mm=6.46m/s2
a
E
a = u a · nC c ' =0.05×178.42 mm=8.92 m/s2
t CB
'
a =u a · nd c' =0.05×68.47 mm=3.42m/s2
t CD
'
大小 方向
a ? √
F
= a √ √
E
+ a √
+ a ? F→E ⊥EF
EF
n
t
EF
a =u
F
a ·
p ' f ' =6.02 m/s2
a =u
S2 S3
a ·
p ' s 2 =2.86m/s2
'
2
'
a = u a · p ' s 3 =3.23m/s 2 = a /lCB=28.37rad/s
t
2
CB
3
=
a
t CD
/lCD=24.43rad/s2
项目 数值 单位
a
B
a
C
a
E
a
F
a
S2
a
S3
2
3
6.13
4.31
6.46 m/s 2
6.02
2.86
3.23
28.37
24.45
rad/s 2
12
五、力分析
一、0o 机构动态静力分析
G3 G5 Frmax Js2 方案Ⅲ 1040 840 11000 1.35 N Kg.m2 单位 1.各构件的惯性力,惯性力矩: FI2=m2* a =G2* a /g=746.94 N(与 a 方向相反)
S2 S2 S2
G2 1600
Js3 0.39
FI3=m3* a = G3* a /g=240.37 N(与 a 方向相反) FI5=m5* a =G5* a /g=77.74 N(与 a 方向相反) Fr=Frmax/10=11000/10=1100N MS2=Js2* =13.36 N·m (逆时针)
S3 S3 S3 F F F
2
MS3=Js3* =0.29 N·m (顺时针) hn2= MS2/FI2=10.94/834.12 mm =17.886 mm hn3= MS3/FI3=11.95/343.73 mm =1.206 mm 2.计算各运动副的反作用力 (1)分析构件 5 和 4 对构件 5 进行力的分析,选取比例 尺 μ F=50N/mm,作其受力图
3
构件 5 力平衡:F65+F45+FI5+Fr+G5=0
∴F45= 334.06N
F65=65.65N
对构件 4 进行力的分析,其受力图如右图
平衡有:F34+F54=0 ∴F34=-F54=F45=344.06N
13
(2)对构件 2 受力分析 杆 2 对 B 点求力矩: 可得:
-FI2*LI2b
+F 32*LBC+MS2 =0
t
∴F 32=330.97N
杆2对C点求力矩: 可得:F 21* LBC -FI2* LI2c
t
t
-MS2=0
∴F 12=415.96N
(3)对构件 3 受力分析 杆 3 对点 C 求力矩得:
t
F43*LF43c+ FI3*LFI3c-G3*LG3c- F D*LDC-MS3=0
t
∴F D=427.5N
杆3对D点求力矩: t n G3* LG3d+ F43*LF43d-FI3*LFI3d-F 32*LF 32d+ F 32*LF 32d+MS3=0
t n
t
即:
∴F 23=296.8N
14
n
(4)求力 F 12,F D(力的多边形)
n
n
解 得 : F 12 F D=621.88N (5)求作用在曲柄 AB 上的平衡力矩 Mb Mb= F21n*LF12 130.9 N.m
n
n
=
1896.8
N
FI2 FI3 项目 数值 746.94 240.37 N 单位 项目 数值 单位 F 12 1896.8
n
FI5 77.74
MS2 13.36
MS3 0.29 N.m F34 344.06 N
Mb 130.9
FnD 621.88 N
FtD 427.5
F 12 415.96
t
F 23 296.8
n
F 23 330.97
t
F45 344.06
F56 65.65
15
二、180o 机构动态静力分析
G3 G5 Frmax Js2 方案Ⅲ 1040 840 11000 1.35 N Kg.m2 单位 1.各构件的惯性力,惯性力矩: FI2=m2* a =G2* a /g=466.94 N(与 a 方向相反)
S2 S2 S2
G2 1600
Js3 0.39
FI3=m3* a = G3* a /g=324.78 N(与 a 方向相反) FI5=m5* a =G5
* a /g=516 N(与 a 方向相反) Fr=Frmax/10=11000/10=1100N MS2=Js2* =38.30 N·m (顺时针)
S3 S3 S3 F F F
2
MS3=Js3* =9.54 N·m (顺时针) hn2= MS2/FI2=10.94/834.12 mm =82.02 mm hn3= MS3/FI3=11.95/343.73 mm =27.83 mm 2.计算各运动副的反作用力 (1)分析构件 5 和 4 对构件 5 进行力的分析,选取比例尺 μ F=50N/mm,作其受力图
3
构件 5 力平衡: 65+F45+FI5+Fr+G5=0 F
∴F45= 2474.44N
F65=301.56N
对构件 4 进行力 的分析,其受力 图如右图
平衡有:F34+F54=0
16
∴F34=-F54=F45=2474.44N
(2)对构件 2 受力分析 杆 2 对 B 点求力矩: 可得:
-FI2*LI2b
+F 32*LBC+MS2 =0
t
∴F 32=385.04N
杆2对C点求力矩: 可得:F 21* LBC -FI2* LI2c
t
t
-MS2=0
∴F 12=141.43N
(3)对构件 3 受力分析 杆 3 对点 C 求力矩得:
t
F43*LF43c+ FI3*LFI3c-G3*LG3c- F D*LDC-MS3=0
t
∴F D=934.01N
杆3对D点求力矩: t n G3* LG3d+ F43*LF43d-FI3*LFI3d-F 32*LF 32d+ F 32*LF 32d+MS3=0
t n
t
即:
17
∴F 23=4965.73N
(4)求力 F 12,F D(力的多边形)
n n
n
解得:F 12=6836.7N (5)求作用在曲柄 AB 上的平衡力矩 Mb Mb= F21*LF12 130.9 N.m 428.33
n
F D=2234.48N
n
FI2 FI3 项目 数值 466.94 342.78 N 单位 项目 数值 F 12 6836.7
n
FI5 516
MS2 38.30
MS3 9.54 N.m F34
Mb 82.02
FnD FtD 2234.5 934.01 N F56 301.56
F 12 141.43
t
F 23
n
F 23
t
F45
4965.7 385.04 2474.44 2474.4
18
单位
N
六、小组总结
本次课程设计是由我们的十位组员一起努力完成的, 期间我们遇到 了很多的困难和问题,但是我们总是能克服,比如我们作图不准,于 是我们拿出了大一时期学会的 CAD,用 CAD 来制作机构简图,CAD 的 使用使得我们的误差大大减少,我们的分点也是比较科学的,避免了 同学在计算时滑块相距很近的问题。 这是对我们大二所学的机械原理 的一次总结和利用, 通过近两周的设计让我对自己所设计的课题的不 断努力和完善,进一步让自己加深了对机械原理这门课程的理解。在 实际设计过程中,不但检验了我对机械原理这么课程的理解能力,而 且更加锻炼了我的动手能力。在此期间,为了能使 自己设计的机构 有“物”可依,查阅大量的文献资料就必不可少,而且在查阅资 料 的过程中, 让我接触到了国内外对机械产品最新的研究,这不但扩 展了我的知 识面, 更让我了解到机械产品在我们日常生活中广泛的 应用空间。所以通过这次设计, 让我对机械设计产生了浓厚的兴趣, 也发现在今后我们国家对设计类人才的庞大需求量, 这也为我将来找 工作提供了强有力的动力! 总之, 这份六杆机构的课程设计让我们更加了解了机械设计的理 论与实际知识,也让我们体会到了小组团结共进的力量。
19
七、课程设计个人
心得与总结
“世上无难事, 只怕有心人。 是我在课程设计中最深刻的体会, ” 无论怎么说,课程设计虽说很难,但是只要自己认真去做,去思考分 析,平时还要多问多请教,再难的事也能做好。特别作为组长,我深 知只有共同进步才是真的进步,一个团体就如同一个水桶,它的容量 由最短的一根木板决定,所以我要努力让我们的每一个组员都要进 步、努力。 另一点重要的是, 一定要勤快点,克服我们最大的弱点——懒 惰。要有恒心,有耐力, 且坚定自己的信念,就一定能成功,至少 也尽了最大的努力。压力也是非常重要的,有压力才有动力,在压力 的作用下就能催生让人满意的效果, 这一点我也颇有感触比如我规定 自己什么时候把速度,加速度求出来,那种压力让自己不断进步。 由于这是我第一次做设计类的课题, 让我对实际工程中对设计要 求的严谨有了更进一步的了解。 在对所设计的机构进行建模的过程 中,迫使我去熟练掌握 CAD 软件,而通过对这些软件的学习,加强 了我的自学能力,也进一步提高了我的软件操作能力。 总而言之,我只有一步一步的努力才能攀上最高的山峰。 XXX(组长) 学号 0806100322
20
八、参考文献
徐绍军 云忠 工程图学(第二版) 中南大学出版社 哈尔滨工业大学理论力学教研室 理论力学 1(第七版) 高等教育出版社 孙桓 陈作模 葛文杰 机械原理(第七版) 高等教育出版社
21
百度搜索“爱华网”,专业资料,生活学习,尽在爱华网