机械原理课程设计说明书
设计题目:压 床 机 构 设 计
学院 机械工程学院 班级 机械0000班 设计者 学号 指导老师
2012 年1 月13日
目录
一. 设计要求----------------------------------------------------------------3
1. 压床机构简介--------------------------------------------------------------------3
2. 设计内容-----------------------------------------------------------------3
(1) 机构的设计及运动分折-------------------------------------------------3
(2) 机构的动态静力分析----------------------------------------------------3
(3) 凸轮机构构设计---------------------------------------------------------3
二.压床机构的设计: ----------------------------------------------------4
1. 连杆机构的设计及运动分析------------------------------------------4
(1) 作机构运动简图-----------------------------------------------------4
(2) 计算长度-------------------------------------------------------------4
2. 机构运动速度分析-------------------------------------------------------5
3. 机构运动加速度分析----------------------------------------------------6
4. 机构动态静力分析-------------------------------------------------------8
(1).各构件的惯性力,惯性力矩---------------------------------------8
(2).计算各运动副的反作用力-----------------------------------------8
三.凸轮机构设计--------------------------------------------------------11
四、齿轮设计------------------------------------------------------------13
五、参考文献------------------------------------------------------------13
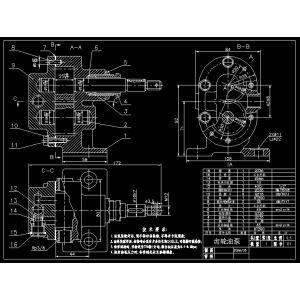
一、压床机构设计要求 1.压床机构简介
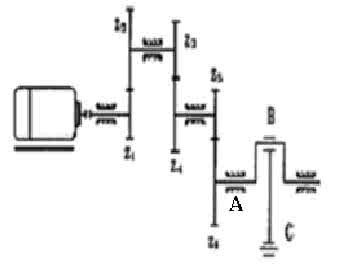
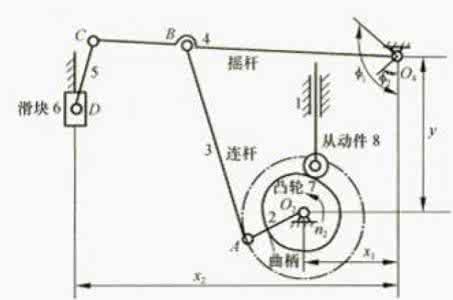
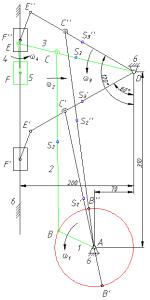
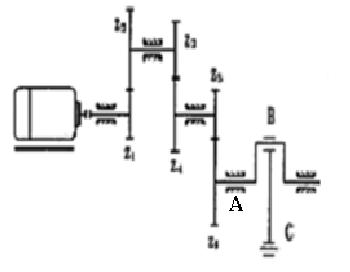
图9—6所示为压床机构简图。其中,六杆机构ABCDEF为其主体机构,电动机经联轴器带动减速器的三对齿轮z1-z2、z3-z4、z5-z6将转速降低,然后带动曲柄1转动,六杆机构使滑块5克服阻力Fr而运动。为了减小主轴的速度波动,在曲轴A上装有
飞轮,在曲柄轴的另一端装有供润滑连杆机构各运动副用的油泵凸轮。
2.设计内容:
(1)机构的设计及运动分折
已知:中心距x1、x2、y, 构件3的上、下极限角,滑块的冲程H,比值 CE/CD、EF/DE,各构件质心S的位置,曲柄转速n1。
要求:设计连杆机构 , 作机构运动简图、机构1~2个位置的速度多边形和加速度多边形、滑块的运动线图。以上内容与后面的动态静力分析一起画在l号图纸上。
(2)机构的动态静力分析
已知:各构件的重量G及其对质心轴的转动惯量Js(曲柄1和连杆4的重力和转动惯量(略去不计),阻力线图(图9—7)以及连杆机构设计和运动分析中所得的结果。
要求:确定机构一个位置的各运动副中的反作用力及加于曲柄上的平衡力矩。作图部分亦画在运动分析的图样上。
(3)凸轮机构构设计
已知:从动件冲程H,许用压力角[α ].推程角δ。,远休止角δı,回程角δ',从动件的运动规律见表9-5,凸轮与曲柄共轴。
要求:按[α]确定凸轮机构的基本尺寸.求出理论廓
线外凸曲线的最小曲率半径ρ。选取滚子半径r,绘制凸轮实际廓线。以上内容作在2号图纸上
二、压床机构的设计
1、连杆机构的设计及运动分析(图见附录)
表9-5
设计内容
单位 符号 数据
X1 70
mm X2 200
y 310
(º) ρ' 60
ρ'' 120
连杆机构的设计及运动分析
mm H 210
CE/CD 1/2
EF/DE 1/4
r/min n1 90
1/2
BS2/BC DS3/DE
1/2
已知:X1=70mm,X2=200mm,Y=310mm,
ψ3=60°,ψ3=120°,H=210mm,CE/CD=1/2, EF/DE=1/4, BS2/BC=1/2, DS3/DE=1/2。
由条件可得;∠EDE'=60° ∵DE=DE' ∴△DEE'等边三角形 过D作DJ⊥EE',交EE'于J,交F1F2于H
∵∠HDI=1/2∠EDE''+∠IDE'' =60°+30°/2 =90°
∴HDJ是一条水平线 ∴DH⊥FF' ∴FF'∥EE' 过F'作F'K⊥EE' 过E'作E'G⊥FF', ∴F'K=E'G
在△FKE和△E'GF'中, KE=GF', FE=E'F', ∠FKE=∠E'GF'=90° ∴△F'KF'≌△E'GF' ∴KE= GF'
∵EE'=EK+KE', FF'=FG+GF' ∴EE'=FF'=H ∵△DE'E是等边三角形 ∴DE=EF=H=210mm ∵EF/DE=1/4, CE/CD=1/2
∴EF=DE/4=210/4=52.5mm CD=2*DE/3=2*210/3=140mm 连接AD,有tan∠ADI=X1/Y=70/310
1
11
mm
又∵AD=
∴在三角形△ADC1和△ADC2中,由余弦定理得: AC'= AC''=
∴AB=(AC'-AC'')/2=69.01mm
BC=(AC'+AC'')/2=314.43mm
∵BS2/BC=1/2, DS3/DE=1/2 ∴
BS2=BC/2=314.46/2=157.22mm
DS3=DE/2=210/2=105mm
由上可得: AB BC BS2 CD 69.01mm 314.43mm 157.22mm 140mm
=383.44mm =245.42mm
DE 210mm DS3
105mm EF
52.5mm
2、十二点机构运动速度分析:
已知:n1=90r/min;
1 =
n190
2 rad/s = 2 =9.425 rad/s 逆时针
6060
v
B
= 1·lAB = 9.425×0.06901m/s≈0.650 m/s
v
C
= vB + vCB
大小 ? 0.65 ?
方向 ⊥CD ⊥AB ⊥BC
选取比例尺μv=0.01m/s/mm,作速度多边形(图见附录)
vv
C
=
u
v·
pc
=0.01×35.0 m/s =0.350m/s
CB
=
u
v·
bc
=0.01×46.0 m/s =0.460m/s
vvv
E
=
u
v·
pe pf
=0.01×52.0 m/s =0.520m/s
F
=
uu
v·
=0.01×48.0 m/s =0.480m/s
FE
=
v·
ef
=0.01×16.0 m/s =0.160m/s
vv
S2S3
u=u
=
v·v·
ps2
=0.01×23.00 m/s =0.23m/s
ps3=0.01×26.53m/s =0.27m/s
vCB
∴2==0.090/0.31443=0.0286rad/s (逆时针)
lBC
ω3=ω4= 项目
12
vClCDvFElEF
=0.350/0.140=2.500rad/s (顺时针) =0.010/0.0525=3.048ad/s (逆时针)
1
0.650
B
v
0.460
CB
v
0.350
C
v
FE
0.480
F
9.425 0.160
单位 rad/s
m/s
3、机构运动加速度分析:
aC= aCD+ aCD=aB + aCB +aCB
大小: ? √ ? √ √ ? 方向: ? C→D ⊥CD B→A C→B ⊥BC
n
t
n
t
aaa
=ω1lAB=9.425B
nn
22
×0.06901 m/s =6.130m/s2
222 =ωl=1.936×0.140 m/s =0.525m/s3CD CD
222
2BC=ωl=1.988×0.31443 m/s =1.243m/sCB
选取比例尺μa=0.1 m/s2/mm,作加速度多边形图(图见附录)
a
C
=
u
a·
p'c'
2
机械工程学院
=0.05×86.36 m/s=4.318m/s
2
a=
E
u
a·
p'e'
=0.05×129.54 m/s2=6.477m/s2
aCB=a·nCc'
=0.05×50.98 m/s2=2.549 m/s2
t
u
'
aCD=
t
'nua·dc'
2
2
=0.05×85.76 m/s=4.288 m/s
a= aE + aEF + aEF
大小 ? √ √ ? 方向 √ √ F→E ⊥EF
F
n
t
aF=a
S2
a
S3
= 2
u=u=u
a
·
p'f'=0.05×125.87 m/s2=6.294 m/s2
'p's2=0.05×102.17 m/s2=5.109m/s2
a·a·
t
'p's3=0.05×64.77 m/s2= 3.239m/s2
2
2
=3
a
aCB/lCB=2.549 /0.31443 rad/s=8.107 rad/s
/lCD=4.288/0.14 rad/s=30.629 rad/sCD
t
2
2
项目 4 12 单位
a
B
a
C
a
E
a
F
a
S2
a
S3
2
3
6.130 6.130
4.2 4.318
6.6 6.477
8.0 6.0 3.0 4.653 17.857
5.109 30.629
rad/s2
m/s2
4、机构动态静力分析
G2 G3 G5 Frmax Js2 Js3
12点 1600 1000 840 11000 1.35 0.39
N Kg.m单位
1.对十二点各构件的惯性力,惯性力矩:
FI2=m2*aS2=G2*aS2/g=1600×6.000/9.8 N =979.59 N(与aS2方向相同) FI3=m3*aS3= G3*aS3/g=1000×3.250/9.8 N =331.63 N(与aS3方向相反) FI5=m5*aF=G5*aF/g=840×8.000/9.8 N =685.71N(与aF方向相反) F
r
=F
rmax/10=11000/10=1100N
MS2=Js2*2=1.35×4.656 N·m =6.28N·m (逆时针) MS3=Js3*3=0.39×17.857 N·m =6.968 N·m (逆时针) hn2= MS2/FI2=10.94/979.59 mm =6.41 mm hn3= MS3/FI3=11.95/331.63mm =20.99 mm 2.计算各运动副的反作用力 (1)分析构件5和4
对构件5进行力的分析,选取比例尺 μF=25N/mm,作其受力图
构件5力平衡:F65+F45+FI5+Fr+G5=0
∴F45= 2717N
F65=703N
对构件4进行力的分析,其受力图如右图
平衡有:F34+F54=0 ∴F34=-F54=F45=2717N
方案Ⅲ
(2)对构件2受力分析 杆2对B点求力矩:
t
可得: FI2*LI2b +G2*LG2b-F32*LBC =0
∴Ft32=286.76N
杆2对C点求力矩:
t
可得:F21* LBC +FI2* LI2c -G2*LG2c=0
∴Ft21=311.86N (3)对构件3受力分析 杆3对点C求力矩得:
t
F43*LF43c+ FI3*LFI3c-G3*LG3c- F63*LDC=0
∴Ft63=1128.56N
杆3对D点求力矩:
n
G3* LG3d+ F43*LF43d-FI3*LFI3d + F32*LF32d=0
∴Fn32=4609.34N
n
n
n
机械工程学院
(4)求力F21,F63
nn
解得:F21=7000N F63=3500N
(5)求作用在曲柄AB上的平衡力矩Mb
Mb= F12*LF12
=5461×0.02523 =137.78 N.m
F61=F12=109.22×50 N =5461 N.
F
I3
FI5 F63 F63 项目 FI2
数值 979.59 331.63 685.71 3500 1128.56 单位 N N
Generated by Foxit PDF Creator © Foxit Software http://www.foxitsoftware.com For evaluation only.机械工程学院三、凸轮机构设计 符号 单位 方案 3 h mm 19 [α] 30 δ0 () 60 35 750δ01δ0'有 H/r0=0.45, 即有 r0=H/0.45=17/0.45=37.778mm 取 r0=48mm 取 rr=5mm 在推程过程中: 由 a=π2Hω2 cos(πδ/δ0)/(2δ02)得 当δ0 =650 时,且 00=0,即该过程为加速推程段, 当δ0 =650 时,且δ>=32.50, 则有 a
Generated by Foxit PDF Creator © Foxit Software http://www.foxitsoftware.com For evaluation only.机械工程学院3)齿轮机构几何尺寸的计算:齿轮 m=5>1 且为正常齿制故 ha*=1 , c*=0.25, m=6名称 分度圆直径 d 法向齿距 Pn 啮合角α′小齿轮120大齿轮192 17.70计算公式d=mz Pn=πm·cosα20°20°中心距 a(a′) 齿顶高 ha 齿根高 hf 齿全高 h 齿顶圆直径 da 齿根圆直径 df 重合度εa 分度圆齿厚 s6 7.5 13.5 132 105156 6 7.5 13.5 204 187ha=ha* m hf=(ha* +c*)m h=ha+hf da=d+2ha df=d-2hf1.1009.42参考文献:1. 孙 恒、陈作模主编.机械原理.北京.高等教育出版社. 2. 杨胜强 马麟主编. 工程制图学及计算机绘图. 国防工业出版社. 3. 刘毅主编. 机械原理课程设计 . 华中科技大学出版社.12
百度搜索“爱华网”,专业资料,生活学习,尽在爱华网