机械原理课程设计任务书(十一)
姓名 专业 班级 学号
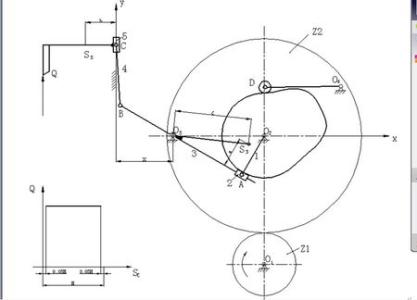
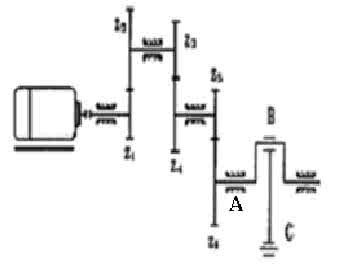
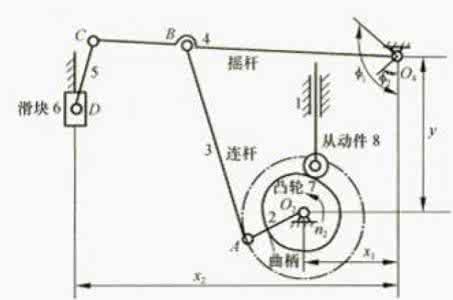
一、设计题目:插床齿轮机构的设计 二、系统简图:
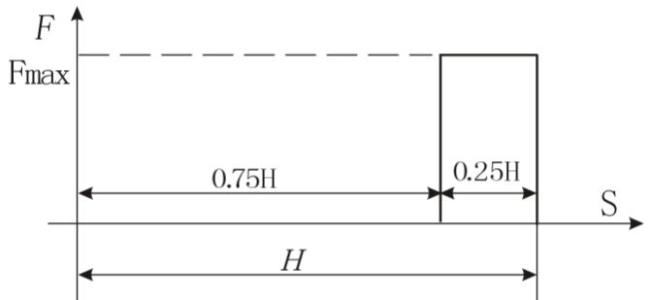
三、工作条件
已知:齿数Z1传动,齿轮与曲柄共轴。
四、原始数据
五、要求:
1)选择变位系数;
2)计算该对齿轮传动的各部分尺寸; 3)A2纸上画出三对齿啮合图; 4)编写说明书。 指导教师:
开始日期: 年 月 日 完成日期: 年 月 日
1数学模型
1中心距a:
am
(z1z2)2 ;
a=(a/5+1)5;
2啮合角:
cos()
m(z1z2)
cos();2
实inv2tan(x1x2)/(z1z2)inv;
3分配变位系数x、x;
1
2
zmin
2ha
172sin
x1minha(zminz1)/zmin;
x2minha(zminz2)/zmin;
(invinv)(z1z2)x1x2;
2tan
4齿轮基本参数:
(注:下列尺寸单位为mm)
齿顶高系数:
ha1.0
齿根高系数: c0.25
齿顶高变动系数: x1x2y
分度圆直径; d1mz1 d2mz2 基圆直径; db1mz1cos 齿顶高: 齿根高: 齿顶圆直径: 齿根圆直径; 节圆直径: 齿距: 节圆齿距: 基圆齿距: db2mz2cos h
a1m(hax1) ha2m(hax2)
h
f1m(hacx1) hf2m(h
acx2)
da1d12ha1 da2d22ha2 df1d12hf1 df2d22hf2 d
cos1d1
cos
d
cos2d2
cos
pm
pp
coscos
pbmcos
中心距变动系数 y=(aa)/m; 分度圆齿厚:
s5
1
m2x5mtan2 1s62m2x6mtan
5 重合度:
1
[z1(tana1tan)z2(tana2tan)]2
a1cos1(db1/da1)
a2cos1(db2/da2)
一般情况应保证
1.2

6齿顶圆齿厚:
sa1s1
ra1
2ra1(inva1inv)r1
ra2
2ra2(inva2inv)r2
sa2s2
一般取sa0.25
7 展角:
1tan(arccos
db1d)arccosb1d1d1
2tan(arccos
db2d)arccosb2d2d2
2程序框图
#include"math.h" #include"stdio.h" #define z1 13.0 #define z2 40.0
#define t 20*3.14/180 /*yalijiao,unit:rad*/ #define m 8 /*moshu*/ #define hax 1.0 #define cx 0.25 #define Zmin 17.0 #define pi 3.14 main( )
{ int a,ai; double ti; /*niehejiao*/ double x1,x2,xh;
double db1,db2; /*jiyuanzhijing*/ double d1,d2; /*fenduyuanzhijing*/ double ha1,ha2; /*chidinggao*/ double hf1,hf2; /*chigengao*/ double df1,df2; /*chigenyuanzhijing*/
3程序清单及运行结果
double di1,di2; /*jieyuanzhijing*/ double da1,da2; /*chidingyuanzhijing*/ double p; /*chiju*/ double p1; /*jieyuanchiju*/ double pb; /*jiyuanchiju*/ double S1,S2; /*chihou*/ double Sb1,Sb2; /*jiyuanchihou*/ double Sa1,Sa2; /*chidinghou*/ double o1,o2; /*jieyuanzhanjiao*/ double e; /*chonghedu*/ double y,Xmin1,Xmin2; /*y shifenlixishu*/ double cdb;
double cgm; /*chidingaobiandongxishu*/ int j,i;
a=m*(z1+z2)/2; printf("a=%d n",a); i=a/5; ai=(i+1)*5;
printf("ai=%d (mm)n",ai); ti=acos(a*cos(t)/ai);
printf("ti=%4.3f (rad)n",ti); cdb=z2/z1;
printf("n cdb=%5.3f n",cdb); y=0.5*(z1+z2)*(cos(t)/cos(ti)-1); printf("y=%5.3f n",y); d1=m*z1; d2=m*z2;
printf("d1=%5.3f,d2=%5.3f (mm)n",d1,d2); db1=m*z1*cos(t); db2=m*z2*cos(t);
printf("db1=%5.3f,db2=%5.3%f (mm)n",db1,db2); di1=d1*cos(t)/cos(ti); di2=d2*cos(t)/cos(ti);
printf("di1=%5.3f,di2=%5.3f (mm)n",di1,di2); p=m*pi;printf("p=%5.3f (mm)n",p); p1=p*cos(t)/cos(ti); pb=pi*m*cos(t);
printf("p1=%5.3f,pb=%5.3f (mm)n",p,p1,pb); Xmin1=hax*(Zmin-z1)/Zmin;
printf("Xmin1=%3.4f (mm)n",Xmin1); Xmin2=hax*(Zmin-z2)/Zmin;
printf("Xmin2=%3.4f (mm)n",Xmin2); xh=0.5*(tan(ti)-ti-(tan(t)-t))*(z1+z2)/tan(t); printf("xh=x1+x2=%5.3f n",xh);
for(j=0;j
{
x1=Xmin1+0.04*j;
x2=xh-x1;
if(x2
cgm=x1+x2-y;
ha1=m*(hax+x1-cgm);
ha2=m*(hax+x2-cgm);
hf1=(hax+cx-x1)*m;
hf2=(hax+cx-x2)*m;
da1=d1+2*ha1;
da2=d2+2*ha2;
df1=d1-2*hf1;
df2=d2-2*hf2;
S1=0.5*pi*m+2*x1*m*tan(t);
S2=0.5*pi*m+2*x2*m*tan(t);
Sb1=S1*db1/d1-db1*(tan(acos(db1/db1))-acos(db1/db1)-(tan(t)-t)); Sb2=S2*db2/d2-db2*(tan(acos(db2/db2))-acos(db2/db2)-(tan(t)-t)); Sa1=S1*da1/d1-da1*(tan(acos(db1/da1))-acos(db1/da1)-(tan(t)-t)); Sa2=S2*db2/d2-da2*(tan(acos(db2/da2))-acos(db2/da2)-(tan(t)-t)); o1=tan(acos(db1/di1))-acos(db1/di1);
o2=tan(acos(db2/di2))-acos(db2/di2);
e=(z1*(tan(acos(db1/da1))-tan(ti))+z2*(tan(acos(db2/da2))-tan(ti)))/(2*pi);
if((S1>cx*m)&&(S2>cx*m)&&(Sb1>cx*m)&&(Sb2>cx*m)&&(Sa1>cx*m)&&(Sa2>cx*m)&&(e>1.2))
{ printf("x1=%5.3f,x2=%5.3f (mm)n",x1,x2);
printf("cgm=%5.3f n",cgm);
printf("ha1=%5.3f,ha2=%5.3f (mm)n",ha1,ha2);
printf("hf1=%5.3f,hf2=%5.3f (mm)n",hf1,hf2);
printf("da1=%5.3f,da2=%5.3f (mm)n",da1,da2);
printf("df1=%5.3f,df2=%5.3f (mm)n",df1,df2);
printf("S1=%5.3f,S2=%5.3f (mm)n",S1,S2);
printf("Sb1=%5.3f,Sb2=%5.3f (mm)n",Sb1,Sb2);
printf("Sa1=%5.3f,Sa2=%5.3f (mm)n",Sa1,Sa2);
printf("o1=%6.5f,o2=%6.5f (rad)n",o1,o2);
printf("e=%5.3f n",e);
printf("db1=%5.3f,db2=%5.3f (mm)n",db1,db2);
}
}
}
运行结果
ai=215 (mm)
ti=0.385 (rad)
df1=92.885, df2=297.421 (mm)
s1=15.792, s2=11.622 (mm)
sb1=16.295, sb2=15.397 (mm)
o1=0.02029, o2=0.02029 (mm)
e=1.381
db1=97.734, db2=300.721 (mm)
x1=0.595, x2=-0.201 (mm)
cgm=0.019
ha1=12.609, ha2=6.238 (mm)
hf1=5.238, hf2=11.609 (mm)
da1=129.219, da2=332.475 (mm)
df1=93.525, df2=296.781 (mm)
s1=16.025, s2=11.389 (mm)
sb1=16.514, sb2=15.178 (mm)
sa1=2.215, sa2=5.372 (mm)
o1=0.02029, o2=0.02029
e=1.370
db1=97.734, db2=300.721 (mm)
4 设计总结
一周的课程设计就要结束了,通过这短短的一周,我学到了很多,首先是对插床齿轮的进一步了解,还有增强了自己动手的实践能力,很多很多,真是受益匪浅。
通过这次设计我进一步的了解了插床,了解了插床机构的组成与运动理论。它是由齿轮机构,导杆机构和凸轮机构组成的。电动机经过减速装置使曲柄转动,从而实现刀具切削运动。为设计所需要的齿轮,需要知道它的压力角大小,齿数,齿顶高系数,顶隙系数来求出传动比,啮合角,中心距等等。同时要保证齿轮根切,重合度,齿顶厚等。这次设计使我有很大感触,我发现自己掌握的知识还是不够牢固,实际演练起来显得很笨拙。不能熟练的运用自己所学过的知识。像大一学过的C语言,还有刚刚学过的机械原理,现在都有很大的用途。经过这一周的实习,我增强了自己的动手实践能力,并且发现了自己的不足之处,学过的知识一定要学会运用,牢牢记住。
5.参考文献
1. 《机械原理课程设计指导书》徐萃萍、冷兴聚
2. 《机械原理点算课程设计指导书》冷兴聚
3. 《机械原理》孙桓、陈作模,高等教育出版社,1995.8
4. 《C程序设计》谭浩强,清华大学出版社,1995.3
5. 《C语言典型零件CAD》王占勇,东北大学出版社,2000.9
6. 《计算机图形学》罗笑南、王若梅,中山大学出版社,1996.10
百度搜索“爱华网”,专业资料,生活学习,尽在爱华网