压床机构
曲柄连杆机构
一、 机构简介及设计数据 1. 机构简介
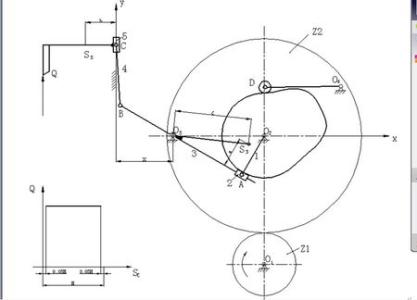
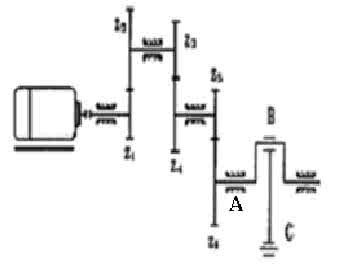
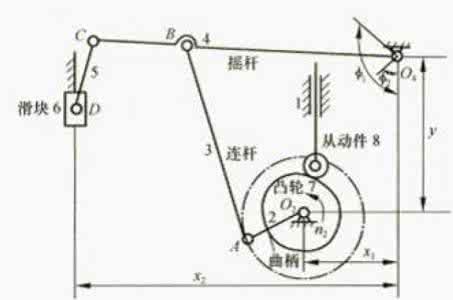
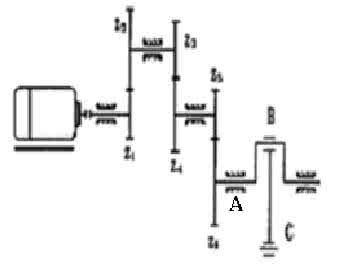
图中所示为压床机构简图。其中,六杆机构ABCDEF为其主体机构,电动机经联轴器带动减速器的三对齿轮z1-z2、z3-z4、z5-z6将转速降低,然后带动曲柄1转动,六杆机构使滑块5克服阻力Fr而运动。为了减小主轴的速度波动,在曲轴A上装有飞轮,在曲柄轴的另一端装有供润滑连杆机构各运动副用的油泵凸轮。
二.设计内容
1. 连杆机构的设计及运动分析
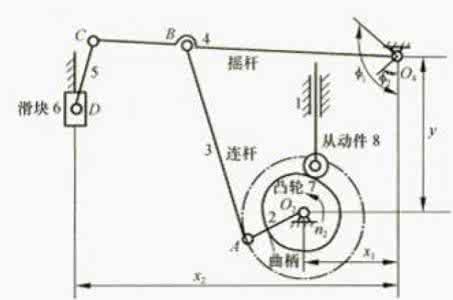
已知:中心距x1、x2、y,构件3的上下极限角3
已知H=180mm,x1=60mm,x2=170mm,y=260mm,ψ3´=60°,
=120°CE/CD=1/2,EF/DE=1/4.n1=90r/min. 3
根据几何关系可知。DE=180mm,CE=60mm,DC=120mm,EF=45mm,AB=51mm,BC=210mm. (1)速度:(m/s)
当构件处于起始点1时,运动简图始图所示。构件1绕A点作逆时针转动,其其速度方向如图所示,大小为vB=lABω1. vc = vB + vCB 大小: 0.336 lABω1 0.298 方向: ⊥CD ⊥AB ⊥BC vc/vE
=L
3
./L.VVC0.504m/sCDEDE
2
VF = VE + VFE 大小: ?=0.492 0.504 ?= 0.132 方向: ∥导轨6 ⊥EC ⊥EF (2) 加速度:(m/s2)
a + a = a + a + a + a 大小:?= 0.94 2.8 4.5 0 0.467 ?
nc
tcnBtBnCBtCB
方向: CD CD BA AB CB BC
a = a + a + a + a 大小:?=6.76 1.41 4.2 ? 2.93 方向:∥导轨6 ED ED EF FE
F
nEtEnFEtFE
2. 连杆机构的动态静力分析
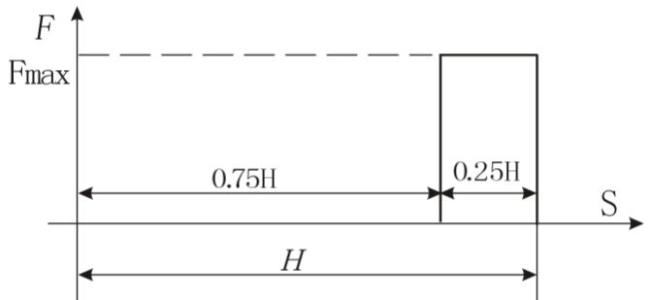
已知:各构件的重力G及其对质心轴的转动惯量Js(曲柄1和连杆4的重力和转动惯量略去不计),阻力线图以及连杆机构设计和运动分析中所得的结果。
要求:确定机构一个位置的各运动副中的反作用力及加于曲柄上的平衡力矩。作图部分亦画在运动分析的图样上。
设计体会
机械原理课程设计是机械课程当中一个重要环节通过了1周的课程设计使我从各个方面都受到了机械原理的训练,对机械的有关各个零部件有机的结合在一起得到了深刻的认识。
由于在设计方面我们没有经验,理论知识学的不牢固,在设计中难免会出现这样那样的问题,如:在选择计算标准件是可能会出现误差,如果是联系紧密或者循序渐进的计算误差会更大,在查表和计算上精度不够准
在设计的过程中,培养了我综合应用机械原理课程及其他课程的理论知识和应用生产实际知识解决工程实际问题的能力,在设计的过程中还培养出了我们的团队精神,大家共同解决了许多个人无法解决的问题,在这些过程中我们深刻地认识到了自己在知识的理解和接受应用方面的不足,在今后的学习过程中我们会更加努力和团结。
由于本次设计是分组的,自己独立设计的东西不多,但在通过这次设计之后,我想会对以后自己独立设计打下一个良好的基础。
参考资料
《机械原理》………………………………………………
高等教育出版社……………孙桓 陈作模 葛文杰 主编
《机械原理课程设计指导书》……………………………
高等教育出版社……………罗洪田主编
百度搜索“爱华网”,专业资料,生活学习,尽在爱华网