根据Incremotion Associates,一家运动控制领域的专业咨询公司的研究,约有8%~10%的混合步进电机应用采用了步校验控制。目前使用其它闭环步进控制法的比例更少:使用反电动势检测的小于1%,使用全伺服控制也仅占市场的约1%。但全伺服控制方式的增长速度会比其他方法更快。
步进电机是种简单的设备,是负载进行定位控制的理想设备。Baldor 公司的电机产品经理John Mazurkiewicz以为,使用步进电机的原因包括:操纵简单(通常在开环状态下使用);可接受数字输进,易于与其他设备接口;不采用反馈,因而本钱低廉。
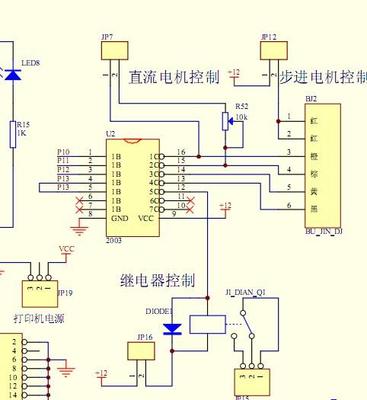
大多数基于步进电机的系统,一般都运行在开环状态下,这样可提供一个低本钱的方案。 事实上,步进系统可进步位移控制的的性能,且不需要反馈。但是,当步进电机在开环时运行,在命令步幅和实际步幅之间会有同步损耗的可能。
很多技术都可用于获得步进电机的CLC位移、速度和转矩控制。按照可控性从低至高的顺序,包括:核步法、反电动势(back electromotive force (emf)检测、或全伺服法。
然而,开环操纵会有失步的风险,这将产生定位失误。但与伺服系统中使用的编码器相比,闭环步进电机采用的编码器本钱更低。
增加的本钱
增加的元件或多付出的开发工作,意味着更多的本钱。但是,额外的本钱也为系统带来了更多的益处。
即使增加了反馈装置,与其他闭环运动控制技术相比步进电机仍然是低本钱的解决方案。为保证结果的精确性,这些本钱是物有所值的。在重要的应用环境种,一个错误所带来的本钱损失将远远高于反馈元件的本钱。
零件精确度和质量的进步是基于闭环控制回路的,其方法是通过在机器或运动系统中进行实际丈量位置和理想位置的比较。
在此山社电机建议了一些采用闭环步进控制的原因与适用状况:
● 无需进行参数调整;系统很轻易建立,通常可以实现免维护;
● 在连续移动进程中,答应利用断点触发摄像机或数据采集设备;
● 控制位置过冲,特别在不答应的状况,例如,纳米制造或半导体行业;
● 在运动结束时纠正位置。
最后一个状况中,要根据系统负载和惯量要求选择合适大小的步进电机,但并非一定要遵从这个规则。