步进电机驱动器是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速和定位的目的。
步进驱动器_步进电机驱动器 -概述
步进电动机和步进电动机驱动器构成步进电机驱动系统。步进电动机驱动系统的性能,不但取决于步进电动机自身的性能,也取决于步进电动机驱动器的优劣。对步进电动机驱动器的研究几乎是与步进电动机的研究同步进行的。
步进驱动器_步进电机驱动器 -分类
步进电机按结构分类:步进电动机也叫脉冲电机,包括反应式步进电动机(VR)、永磁式步进电动机(PM)、混合式步进电动机(HB)等。
(1)反应式步进电动机:也叫感应式、磁滞式或磁阻式步进电动机。其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到10’);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。
(2)永磁式步进电动机:通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。一般为两相或四相;输出转矩小(消耗功率较小,电流一般小于2A,驱动电压12V);步距角大(例如7.5度、15度、22.5度等);断电时具有一定的保持转矩;启动和运行频率较低。
(3)混合式步进电动机:也叫永磁反应式、永磁感应式步进电动机,混合了永磁式和反应式的优点。其定子和四相反应式步进电动机没有区别(但同一相的两个磁极相对,且两个磁极上绕组产生的N、S极性必须相同),转子结构较为复杂(转子内部为圆柱形永磁铁,两端外套软磁材料,周边有小齿和槽)。一般为两相或四相;须供给正负脉冲信号;输出转矩较永磁式大(消耗功率相对较小);步距角较永磁式小(一般为1.8度);断电时无定位转矩;启动和运行频率较高;发展较快的一种步进电动机。
步进驱动器_步进电机驱动器 -系统控制
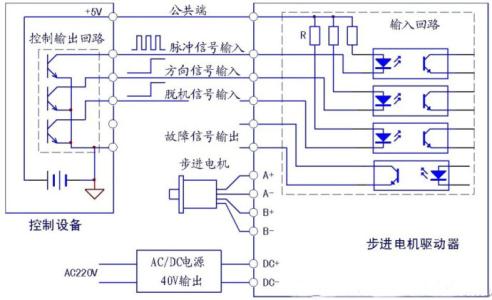
步进电动机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源(步进电动机驱动器)。控制器(脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进驱动器系统控制图
步进驱动器_步进电机驱动器 -步进电机驱动器型号
1:3F22E0、3F2298、3F2278、3F860、3F556、3F542、F1178、F856、F556、F542、F540、F306、F320
F542步进电机驱动器
3F2298
1、表示相数,3表示3相
2、F表示步进驱动器
4、22表示电压220V
3、98表示电流9.8A
2:F3922、F3722L、F3722、F3722A、F3722M、F368、F3522A、F3522H、F3522、F2611、F268C、F875、F556、F256B、F265、F255、F235B、F245、F223
F3522
1、F表示步进驱动器
2、表示相数,2表示两相,3表示3相
3、5表示电流5A
4、22表示电压220V
步进驱动器_步进电机驱动器 -基本原理
步进电机驱动器的原理,采用单极性直流电源供电。只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
步进电机工作原理示意图
四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。单四拍与双四拍的步距角相等,但单四拍的转动力矩小。八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
电源通电时序与波形分别如图
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示。
驱动器相当于开关的组合单元。通过上位机的脉冲信号有顺序给电机相序通电使电机转动。
波形分别如图2.a、b、c所示。
驱动器相当于开关的组合单元。通过上位机的脉冲信号有顺序给电机相序通电使电机转动。
斩波恒流功率驱动
恒流驱动的设计思想是,设法使导通相绕组的电流不论在锁定、低频、高频工作时均保持固定数值。使电机具有图6斩波恒流功率驱动接口
斩波恒流功率接口原理图
恒转矩输出特性。这是使用较多、效果较好的一种功率接口。图6是斩波恒流功率接口原理图。图中R是一个用于电流采样的小阻值电阻,称为采样电阻。当电流不大时,VT1和VT2同时受控于走步脉冲,当电流超过恒流给定的数值,VT2被封锁,电源U被切除。由于电机绕组具有较大电感,此时靠二极管VD续流,维持绕组电流,电机靠消耗电感中的磁场能量产生出力。此时电流将按指数曲线衰减,同样电流采样值将减小。当电流小于恒流给定的数值,VT2导通,电源再次接通。如此反复,电机绕组电流就稳定在由给定电平所决定的数值上,形成小小的锯齿波,如图所示。
电机绕组电流
步进驱动器_步进电机驱动器 -组成结构
步进电机驱动器主要结构主要有以下部分作用为
中科F223步进电机驱动器
环行分配器
根据输入信号的要求产生电机在不同状态下的开关波形信号处理
对环行分配器产生的开关信号波形进行PWM调制以及对相关的波形进行滤波整形处理3:推动级:对开关信号的电压,电流进行放大提升主开关电路
用功率元器件直接控制电机的各相绕组
保护电路
当绕组电流过大时产生关断信号对主回路进行关断,以保护电机驱动器和电机绕组
传感器
对电机的位置和角度进行实时监控,传回信号的产生装置
步进驱动器_步进电机驱动器 -驱动方式
步进电机驱动器
步进电机不能直接接到工频交流或直流电源上工作,而必须使用专用的驱动器,如图所示,它由脉冲发生控制单元、功率驱动单元、保护单元等组成。图中点划线所包围的二个单元可以用微机控制来实现。驱动单元必须与驱动器直接耦合(防电磁干扰),也可理解成微机控制器的功率接口,这里予以简单介绍。
单电压功率驱动
步进电机驱动器
实用单电压功率驱动接口及单步响应曲线
电路如图所示。在电机绕组回路中串有电阻Rs,使电机回路 双电压功率驱动接口
时间常数减小,高频时电机能产生较大的电磁转矩,还能缓解电机的低频共振现象,但它引起附加的损耗。一般情况下,简单单电压驱动线路中,Rs是不可缺少的。Rs步进电机单步响应的改善如图3(b)。
双电压功率驱动
双电压驱动的功率接口如图4所示。双电压驱动的基本思路是在较低(低频段)用较低的电压UL驱动,而在高速(高频段)时用较高的电压UH驱动。这种功率接口需要两个控制信号,Uh为高压有效控制信号,U为脉冲调宽驱动控制信号。图中,功率管TH和二极管DL构成电源转换电路。当Uh低电平,TH关断,DL正偏置,低电压UL对绕组供电。反之Uh高电平,TH导通,DL反偏,高电压UH对绕组供电。这种电路可使电机在高频段也有较大出力,而静止锁定时功耗减小。
高低压功率驱动
步进电机驱动器
高低压功率驱动接口如图所示。高低压驱动的设计思想是,不论电机 高低压功率驱动接口
工作频率如何,均利用高电压UH供电来提高导通相绕组的电流前沿,而在前沿过后,用低电压UL来维持绕组的电流。这一作用同样改善了驱动器的高频性能,而且不必再串联电阻Rs,消除了附加损耗。高低压驱动功率接口也有两个输入控制信号Uh和Ul,它们应保持同步,且前沿在同一时刻跳变,如图所示。图中,高压管VTH的导通时间tl不能太大,也不能太小,太大时,电机电流过载;太小时,动态性能改善不明显。一般可取1~3ms。(当这个数值与电机的电气时间常数相当时比较合适)。
斩波恒流功率驱动
步进电机驱动器
恒流驱动的设计思想是,设法使导通相绕组的电流不论在锁定、低频、高频工作时均保持固定数值。使电机具有 图6 斩波恒流功率驱动接口
步进电机驱动器
恒转矩输出特性。这是使用较多、效果较好的一种功率接口。图6是斩波恒流功率接口原理图。图中R是一个用于电流采样的小阻值电阻,称为采样电阻。当电流不大时,VT1和VT2同时受控于走步脉冲,当电流超过恒流给定的数值,VT2被封锁,电源U被切除。由于电机绕组具有较大电感,此时靠二极管VD续流,维持绕组电流,电机靠消耗电感中的磁场能量产生出力。此时电流将按指数曲线衰减,同样电流采样值将减小。当电流小于恒流给定的数值,VT2导通,电源再次接通。如此反复,电机绕组电流就稳定在由给定电平所决定的数值上,形成小小的锯齿波,如图所示。
斩波恒流功率驱动接口也有两个输入控制信号,其中u1是数字脉冲,u2是模拟信号。这种功率接口的特点是:高频响应大大提高,接近恒转矩输出特性,共振现象消除,但线路较复杂。相应的集成功率模块可供采用。
升频升压功率驱动
为了进一步提高驱动系统的高频响应,可采用升频升压功率驱动接口。这种接口对绕组提供的电压与电机的运行频率成线性关系。它的主回路实际上是一个开关稳压电源,利用频率-电压变换器,将驱动脉冲的频率转换成直流电平,并用此电平去控制开关稳压电源的输入,这就构成了具有频率反馈的功率驱动接口。
集成功率驱动
步进电机驱动器
已有多种用于小功率步进电机驱动器的集成功率驱动接口电路可供选用。
L298芯片是一种H桥式驱动器,它设计成接受标准TTL逻辑电平信号,可用来驱动电感性负载。H桥可承受46V电压,相电流高达2.5A。L298(或XQ298,SGS298)的逻辑电路使用5V电源,功放级使用5~46V电压,下桥发射极均单独引出,以便接入电流取样电阻。L298(等)采用15脚双列直插小瓦数式封装,工业品等级。它的内部结构如图7所示。H桥驱动的主要特点是能够对电机绕组进行正、反两个方向通电。L298特别适用于对二相或
步进电机驱动器
四相步进电机驱动。 专用芯片构成的步进电动驱动系统