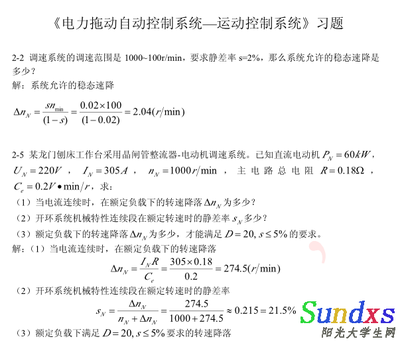
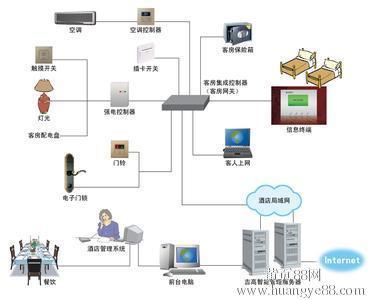
1防抱死系统概述 随着时代的进步,高速公路修建程度加大,随之而来的是汽车工业的快速发展。因此,汽车在行驶过程中的安全性和稳定性受到人们的重视程度越来越大。在全面制动的过程中为了满足汽车对制动的要求,是汽车的制动器能更加合理科学地分配制动力,防抱死系统在汽车上的应用程度不断加大。 防抱死制动系统指的是在汽车制动的过程中,能实时对车轮的滑动率情况进行判定,从而自动调节在车轮上发生作用的制动力矩大小,以防止车轮出现抱死状态,获得最佳制动效果的电子装置。该系统能字一定范围之内控制车轮的滑动率,对轮胎与路面之间的附着力进行充分有效的利用,从而缩短汽车制动的距离,显著提高汽车在制动时的稳定性、安全性和可操作性,从而避免车轮出现抱死状态发生交通事故。 汽车在行驶过程中,由于制动强度不断增加,导致车轮的滚动成分变少,滑动成分变多,一般用来表示汽车在制动过程中滑动成分的多少的参数是滑动率S,滑动率越大表示滑动成分越少。滑动率与速度之间的关系如下:S = [(u-rw)/u]*100% 其中,u代表车轮的中心速度;r代表没有地面的制动力时车轮的滚动半径;w代表车轮的角速度大小。 目前大多数汽车所采用的防抱死制动系统的组成部件主要为轮速传感器、电子控制单元、压力控制阀、线束、管路等。对汽车防抱死制动系统进行开发的主要内容是研究具体的设计优化运算以及控制程序操作的软件,以实现在汽车具体行驶过程中实时精确的制动协调技术。 2目前防抱死系统控制技术 防抱死控制系统的效果很大程度上取决于系统采用的控制技术,目前,很多汽车的防抱死系统控制技术都是逻辑门限值控制技术,而为了不断提高控制性能,还应该在此基础上提出更多新的技术模式,以实现更好的控制效果。 PID 控制技术。滑动率的表示在上文已叙述,实际滑动率S与期望滑动率S0之间往往有一定误差,假设误差为e=S-S0,则汽车防抱死控制系统的PID 的控制可以表示为: 由此公式可以看出,防抱死控制器的设计就是根据防抱死动态系统,确定一组参数Kp、Ki 、Kd,使车轮的滑动率能以尽量逼近已设定的滑动率期望值S0。 模糊控制技术。模糊控制技术主要用于以滑动率为控制对象的汽车防抱死制动系统,模糊控制的参数中,有车轮的期望滑动率与实际滑动率之间的的偏差e以及这个偏差量的的变化率eC,制动管路油压U,具体的关系为U =α × e + (1-α)eC。α是修正因子,它的大小直接两个滑动率之间的偏差以及偏差变化率的加权程度,调整该参数,就可以改变防抱死系统控制的规则。 逻辑门限值控制技术。运用这种控制技术时要对控制参数设定一些控制门限值,汽车在制动过程中,要根据计算出的参数值大小与参数对应的门限值大小之间的关系来判定车轮具体的运动状态,从而控制调价汽车的制动压力,实现足够的制动强度和稳定性。目前,此种控制方法大多将车轮的转动角加速度作为控制参数,车轮的滑动率是辅助控制参数。 当然,防抱死制动系统的控制技术远不止以上几种,随着时代的发展,还将衍生出更多适合汽车规律的控制技术。 3汽车转向防抱死系统误差控制 转向最优滑模控制器。汽车的转向控制器有两个组成部分,即前轮转向控制器和横摆力矩控制器。汽车转向时的动力学结果会受到多方面的影响,比如参数变化不确定,制动系统出现耦合干扰情况,道路的环境对其造成干扰等,为了减少多种不确定因素的干扰程度,设计转向最优滑模控制器有助于控制汽车转向防抱死制动系统之间的协同误差。这种控制器将横摆力矩与主动前轮的转向相结合。 协同控制器。协同控制系统是汽车转向/防抱死制动系统的协调控制结构,其工作原理如图所示 在转向控制中,该系统利用了制动横摆力矩在车轮上的作用力,这导致转向控制对滑移率造成很大程度的干扰,为了减少这个干扰的影响程度,在协同控制器中要加入补偿控制器。 在协同控制器中,有一个重要的参数就是协同误差,协同误差反应了制动系统与转向系统之间的耦合关系,汽车在转向制动的过程中如果不考虑转向跟踪的误差,只是进行纵向的制动,很容易使车体大幅度摆动甚至失控,造成安全事故。因此,防抱死控制器的设计原则是在保证汽车转向控制性能良好的基础上尽量缩短制动距离。 汽车在行驶过程中,由于各种制动系统之间的相互影响,极有可能影响汽车行驶的稳定性和安全性。协同控制就是为了减少各种制动系统之间的耦合影响,能提高汽车在转向制动过程中的动态性能,也能提高各个系统之间的配合协调性,以增强汽车行驶的安全性和稳定性。
参考文献 [1] 李 果,刘 华.伟汽车转向防抱死制动控制系统研究[J].计算机工程与应用,2012.11 [2] 王 铁,田立国,白雪峰.模糊PID控制在车辆制动过程中的应用[J].沈阳理工大学学报,2010.04 [3] 贾占云.汽车ABS技术的发展趋势研究[J].黑龙江科技信息,2011.09